MIT 的 3 合一训练工具简化了机器人的学习

教会机器人新技能过去需要编码专业知识。但新一代的机器人可能只需要任何人就能学习。
工程师们正在设计能够“通过示范学习”的机器人助手。这种更自然的训练策略使人们能够引导机器人完成一项任务,通常有三种方式:通过遥控,例如操作操纵杆远程控制机器人;通过物理移动机器人来完成动作;或者自己执行任务,同时机器人观看并模仿。
通过实践学习的机器人通常只采用这三种演示方法中的一种进行训练。但麻省理工学院(MIT)的工程师们现在开发了一种三合一训练界面,允许机器人通过这三种训练方法中的任何一种来学习任务。该界面是一种手持的、配备传感器的工具,可以连接到许多常见的协作机械臂 。人们可以使用该附件通过远程控制机器人、物理操作机器人或亲自演示任务来教机器人执行任务——无论他们更喜欢哪种方式或哪种方式最适合手头的任务。
MIT 团队在标准的协作机械臂上测试了他们称之为“多功能演示界面”的新工具。具有制造专业知识的志愿者使用该界面执行了在工厂地面上常见的两项手动任务。
研究人员表示,新的界面提供了更高的训练灵活性,这可能扩大与机器人互动的用户和“教师”类型。它还可能使机器人能够学习更广泛的技能。例如,一个人可以远程训练机器人处理有毒物质,而在生产线的下一阶段,另一个人可以物理地移动机器人,模拟打包产品的动作,在生产线末端,另一个人可以使用附件在机器人观看的同时绘制公司标志,机器人通过学习也能做到同样的事情。
“我们正试图创造高度智能和技能的队友,他们能够与人类有效合作,完成复杂的工作,”麻省理工学院航空航天系的研究生 Mike Hagenow 说。“我们相信灵活的演示工具将远远超出制造车间,在其他领域也能帮助机器人得到更广泛的应用,例如家庭或护理环境。”
Hagenow 将在 10 月的 IEEE 智能机器人与系统 (IROS) 会议上展示一篇详细介绍新界面的论文 。该论文的 MIT 合著者包括 Dimosthenis Kontogiorgos,他是麻省理工学院计算机科学与人工智能实验室 (CSAIL) 的一名博士后;Yanwei Wang 博士 ’25,他最近获得了电气工程与计算机科学博士学位;以及麻省理工学院教授、航空航天系主任 Julie Shah。

由 MIT 开发的便携式设备,可用于教机器人新技能。 | 来源:MIT
一起训练
马斯在 MIT 的团队设计可以在工作场所、医院和家庭中与人类一起工作的机器人。她研究的主要重点是开发能够让人们“在职”教机器人新任务或技能的系统。例如,这样的系统将帮助工厂车间工人快速自然地调整机器人的动作以改善其任务,而不是停下来从头开始重新编程机器人的软件——而工人可能并不一定具备这种技能。
该团队的新工作建立在机器人学习中的一个新兴策略之上,该策略称为“从演示中学习”,或 LfD,其中机器人被设计为以更自然、直观的方式进行训练。在查阅 LfD 文献时,Hagenow 和 Shah 发现迄今为止开发的 LfD 训练方法通常分为三大类:远程操作、运动觉训练和自然教学。
一种训练方法可能比其他两种对特定的人或任务更有效。沙赫和哈根诺瓦想知道他们是否可以设计一个工具,将三种方法结合起来,使机器人能够从更多的人那里学习更多的任务。
“如果我们能把这三种不同的人想要与机器人互动的方式结合起来,它可能为不同的任务和不同的人带来好处,”Hagenow 说。
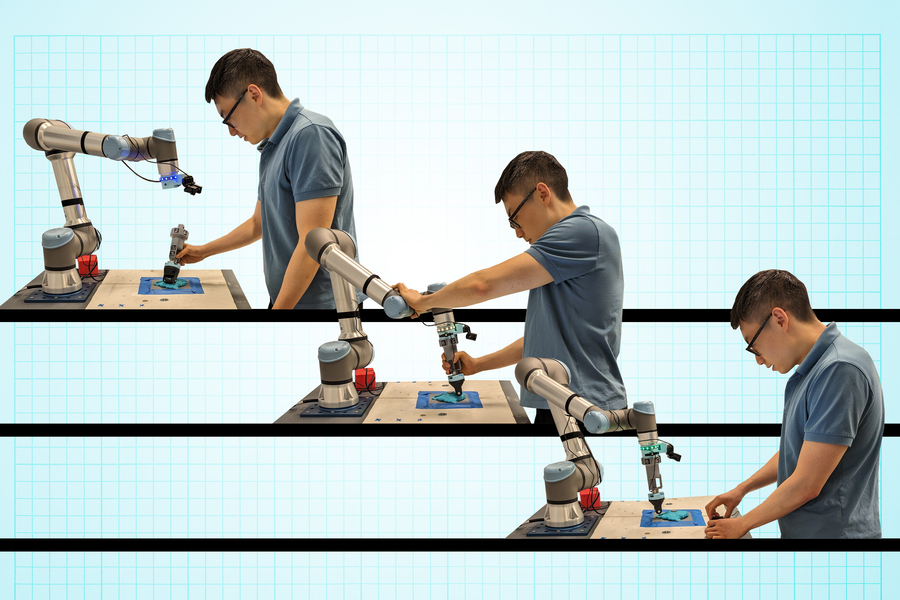
麻省理工学院开发了一种手持界面,使您能够使用三种训练方法中的任何一种来教机器人新技能:自然教学(左上角)、运动教学(中间)和远程操作。 | 来源:麻省理工学院
手头的任务
针对这一目标,团队设计了一种新的多功能演示界面(VDI)。该界面是一个手持式附件,可以安装在典型的协作机器人手臂上。该附件配备了一个摄像头和标记器,用于跟踪工具的位置和随时间推移的运动,以及力传感器来测量执行特定任务时施加的压力。
当该界面安装到机器人上时,整个机器人可以远程控制,界面的摄像头会记录机器人的运动,机器人可以利用这些数据自行学习任务。类似地,当界面连接时,人们可以手动移动机器人完成一个任务。VDI 也可以拆卸并由人手持以执行所需任务。摄像头会记录 VDI 的运动,当重新安装到机器人上时,机器人也可以用来模仿该任务。
为测试附件的可用性,团队将界面和协作机械臂带到当地创新中心,制造专家在那里学习和测试可以改进工厂流程的技术。研究人员设置了一个实验,要求中心的志愿者使用机器人和界面的三种培训方法完成两项常见的制造任务:压配合和成型。在压配合中,用户训练机器人将销钉压入孔中,类似于许多紧固任务。对于成型,一名志愿者训练机器人将一种橡胶状、面团状的物质均匀地推滚在中心杆的表面,类似于某些热成型任务。
对于这两个任务,志愿者们被要求使用每种训练方法,首先使用操纵杆远程操作机器人,然后进行运动学操作,最后,拆卸机器人的附件,并让机器人“自然地”执行任务,同时记录附件的力和运动。
研究人员发现,志愿者们通常更喜欢自然方法而不是远程操作和运动学训练。这些用户都是制造领域的专家,他们提出了每种方法可能在其他方法上有优势的场景。例如,远程操作可能更适合训练机器人处理危险或有毒物质。运动学训练可以帮助工人调整负责搬运重包装的机器人的位置。自然教学可以在演示涉及精细和精确操作的任务时带来好处。
“我们设想在柔性制造环境中使用我们的演示界面,其中一个机器人可能协助执行一系列从特定类型的演示中受益的任务,”Hagenow 表示,他计划根据用户反馈改进附件的设计,并将使用新设计来测试机器人学习。“我们将这项研究视为展示如何通过扩展终端用户在教学中与机器人互动的方式来实现协作机器人的更大灵活性。”











评论