终于搞定了!花30元,DIY了一只机器狗!

花30元,DIY了一只超可爱的机器狗!
本文引用地址:https://www.eepw.com.cn/article/202412/465941.htm
目前,项目已全开源!
它有哪些功能(第1章)?软硬件怎么设计(2-3章)?如何校准舵机(4章)?开源资料入口(6章)?下文咱们一一了解~
1.功能&亮点
支持手机遥控
支持表情、每日天气、时间显示
电路大部分使用插件封装,成本低廉且易于新手焊接,适用于教学
本项目不含电池,成本大致为30元,主要费用在于舵机12元,屏幕4.5元,主控4元
支持功能拓展,代码已完全开源,可以根据现有代码逻辑框架,添加更多好玩有趣的功能
当然你也可以完全重构,使用更好性能的主控
在软件上可以添加语音交互,大模型对话等等
在硬件上也可以添加避障,测温,搭载炮台等等
2.硬件设计
电路由以下部分组成——电源部分、ESP8266主控、外部接口。

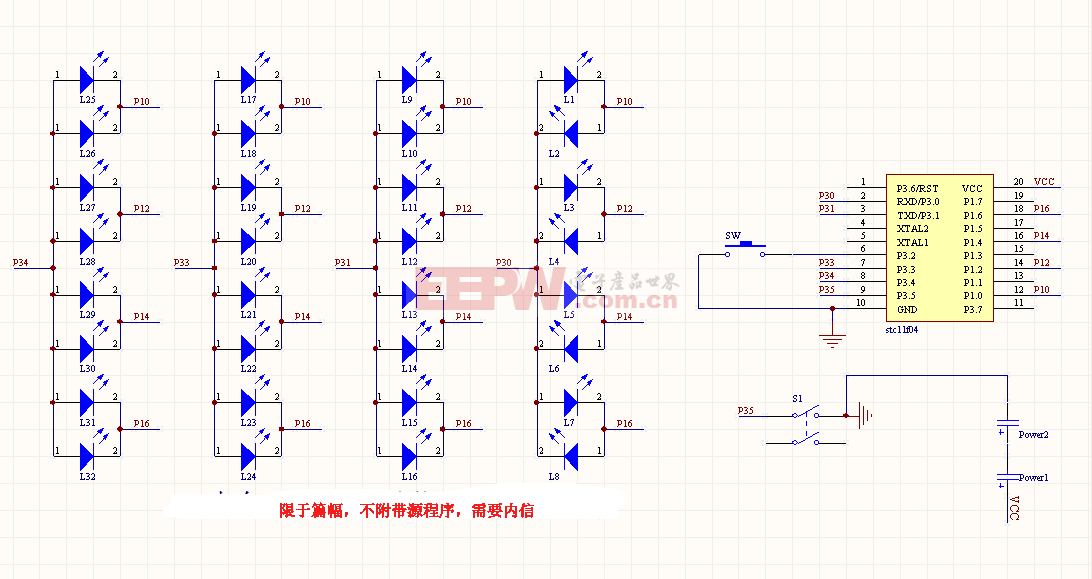
EDA-Robot插件版原理图

EDA-Robot插件版PCB图
①硬件参数
主控:ESP8266,内置WIFI功能,通过AP模式遥控
OLED显示屏:0.96寸,可显示表情、时钟、天气等信息
LDO线性稳压器:AMS1117 ,负责将8.4V和5V电压分别转换成5V和3.3V,为舵机及主控提供电源
舵机:SG-90/MG90,支持180度/360度版本,本文以360度版本为主
供电:14500双节电池组,通过LDO降压稳压器供电
OLED显示屏支持SSD1315,SSD1306驱动,该模块自带屏幕驱动电路,仅需接口接入即可。
电路设计软件:嘉立创EDA
②原理解析
(1)ADC电量检测电路
修改分压器适配 8.4V 到 1V
现在需要适配新的输入电压范围(最大 8.4V)到 ESP8266 的 1.0V ADC 输入。
分压比计算如下:
分压比=1V8.4V=18.4≈0.119分压比=8.4V1V=8.41≈0.119
根据分压公式:
R2R1+R2=0.119R1+R2R2=0.119
假设保持100k ,计算 :
100kR1+100k=0.119R1+100k100k=0.119
R1+100k=100k0.119≈840kR1+100k=0.119100k≈840k
R1≈740kΩR1≈740kΩ
对于 ,输出电压:
Vout=8.4×100k740k+100k=8.4×100840≈1.0VVout=8.4×740k+100k100k=8.4×840100≈1.0V
对于电压较低时(如 4.2V),输出电压为:
Vout=4.2×100k740k+100k=4.2×100840≈0.5VVout=4.2×740k+100k100k=4.2×840100≈0.5V
分压电路成功将8.4V的输入电压,压缩到0-1V范围内
(2)外部接口电路
串口:为方便下载,单独引出了IO0及GND接口作为跳帽插入接口,当插入跳帽时,IO0被拉低,进入下载模式。反之被主控部分电路拉高,进入工作模式。
电池:引出了外部充电拓展接口,VIN与VBAT是开关接口,VIN与GND接口是外部充电模块接口。充电模块选择满电电压大概在8.4V的2串锂电池充电模块。
按键:使用IO2和IO15引脚,IO2按键按下时拉低,空闲时被拉高。但由于IO15必须接下拉电阻,所以这里开关逻辑与IO2相反,按键按下时拉高,空闲时被拉低。
3.软件代码
本章节只介绍部分比较重要的关键代码。
开源网址:
https://oshwhub.com/course-examples/bot-dog 开发文档:
https://wiki.lceda.cn/zh-hans/course-projects/smart-internet/eda-robot/eda-robot-introduce.html
如何通过手机【控制】机器狗?
为了控制机器狗,我写了一个网页,你可以直接使用,也可以参考下方了逻辑,自己写一个,并在此基础上进行拓展。
①控制页面CSS样式表
body { margin: 0; padding: 0; font-family: Arial, sans-serif;
} .container { max-width: 800px; margin: 0 auto; padding: 20px; text-align: center;
} h1 { text-align: center;
} button { display: inline-block; height: auto; width: auto; margin-top: 20px; padding: 10px 20px; background-color: deepskyblue; color: #fff; border: none; border-radius: 20px; /* 添加圆角 */
text-decoration: none; line-height: 2; /* 通过调整line-height的值来调整文字的垂直位置 */
text-align: center; /* 文字居中 */
box-shadow: 2px 2px 5px rgba(0, 0, 0, 0.2); /* 添加立体感 */
transition: all 0.3s ease; /* 添加过渡效果 */
} button:hover { background-color: skyblue; /* 鼠标悬停时的背景颜色 */
transform: translateY(2px); /* 点击效果 */
box-shadow: 2px 2px 8px rgba(0, 0, 0, 0.3); /* 添加更多立体感 */
} .button-grid3 { display: grid; grid-template-columns: repeat(3, 1fr); gap: 10px; justify-content: center; align-content: center; text-align: center; margin: 20px;
} .button-grid2 { display: grid; grid-template-columns: repeat(2, 1fr); gap: 10px; justify-content: center; align-content: center; text-align: center; margin: 20px;
} .button-grid1 { display: grid; border-radius: 20px; /* 添加圆角 */
grid-template-columns: repeat(1, 1fr); justify-content: center; align-content: center; text-align: center; margin: 10px;
}②控制页面JavaScript代码
// 简化 AJAX 请求函数
function sendCommand(action) {
fetch(`/${action}`)
.then(response => response.text())
.catch(() => alert('发送失败,请检查设备连接'));
}
function refreshState(url, displayElementId) {
fetch(url)
.then(response => response.text())
.then(data => { document.getElementById(displayElementId).innerText = data;
});
} function setRefreshInterval(url, displayElementId) {
setInterval(() => refreshState(url, displayElementId), 1000);
} const states = [
{ url: '/batteryVoltage', displayId: 'batteryVoltageDisplay' },
{ url: '/batteryPercentage', displayId: 'batteryPercentageDisplay' },
{ url: '/engine1offsetleftpwm', displayId: 'engine1offsetleftpwmDisplay' },
{ url: '/engine1offsetrightpwm', displayId: 'engine1offsetrightpwmDisplay' },
{ url: '/engine2offsetleftpwm', displayId: 'engine2offsetleftpwmDisplay' },
{ url: '/engine2offsetrightpwm', displayId: 'engine2offsetrightpwmDisplay' },
{ url: '/engine3offsetleftpwm', displayId: 'engine3offsetleftpwmDisplay' },
{ url: '/engine3offsetrightpwm', displayId: 'engine3offsetrightpwmDisplay' },
{ url: '/engine4offsetleftpwm', displayId: 'engine4offsetleftpwmDisplay' },
{ url: '/engine4offsetrightpwm', displayId: 'engine4offsetrightpwmDisplay' }
];
states.forEach(state => setRefreshInterval(state.url, state.displayId));③控制页面HTML代码
<div> <h1>EDA-Robot遥控台</h1> <p>本项目基于ESP8266主控开发</p> <div style="display:flex;justify-content:center"> <p>电压:<span id="batteryVoltageDisplay">0</span></p> <p>电量:<span id="batteryPercentageDisplay">0</span></p> </div> <div style="background-color:papayawhip"> <h3>运动控制</h3> <div style="display:flex;justify-content:center"> ↑ </div> <div style="display:flex;justify-content:center"> ← → </div> <div style="display:flex;justify-content:center"> ↓ </div> <div> 抬左手 抬右手 坐下 趴下 自由模式开 自由模式关 </div> </div> <div style="background-color:limegreen"> <h3>表情控制</h3> <div> 开心 生气 难受 好奇 喜欢 错误 晕 </div> </div> <div style="background-color:orange"> <h3>联网功能</h3> <div> 时间 天气 </div> </div></div>
控制页面的代码是存放在FS文件系统中的,这里主要看AJAX请求函数,这部分的请求与下一小节的页面路由监听代码相对应,我们通过点击页面按钮触发请求。
这里进行了一些简化操作,避免html过长过大导致html加载和响应缓慢,这可能导致esp8266无法正确显示页面。
如何让机器狗【运行起来】?给它注入点赛博灵魂~~
④页面路由监听
void handleWiFiConfig()
{ // 启动服务器
server.on("/left90", HTTP_GET, [](AsyncWebServerRequest *request)
{
actionstate = 10; // 设置标志,执行舵机动作
request->send(200, "text/plain", "Front function started"); });
server.on("/right90", HTTP_GET, [](AsyncWebServerRequest *request)
{
actionstate = 11; // 设置标志,执行舵机动作
request->send(200, "text/plain", "Front function started"); });
server.on("/front", HTTP_GET, [](AsyncWebServerRequest *request)
{
actionstate = 1; // 设置标志,执行舵机动作
request->send(200, "text/plain", "Front function started"); });
server.on("/back", HTTP_GET, [](AsyncWebServerRequest *request)
{
actionstate = 4; // 设置标志,执行舵机动作
request->send(200, "text/plain", "Front function started"); });
server.on("/left", HTTP_GET, [](AsyncWebServerRequest *request)
{
actionstate = 2; // 设置标志,执行舵机动作
request->send(200, "text/plain", "Front function started"); });
server.on("/right", HTTP_GET, [](AsyncWebServerRequest *request)
{
actionstate = 3; // 设置标志,执行舵机动作
request->send(200, "text/plain", "Front function started"); });
server.on("/toplefthand", HTTP_GET, [](AsyncWebServerRequest *request)
{
actionstate = 5; // 设置标志,执行舵机动作
request->send(200, "text/plain", "Front function started"); });
server.on("/toprighthand", HTTP_GET, [](AsyncWebServerRequest *request)
{
actionstate = 6; // 设置标志,执行舵机动作
request->send(200, "text/plain", "Front function started"); });
server.on("/sitdown", HTTP_GET, [](AsyncWebServerRequest *request)
{
actionstate = 8; // 设置标志,执行舵机动作
request->send(200, "text/plain", "Front function started"); });
server.on("/lie", HTTP_GET, [](AsyncWebServerRequest *request)
{
actionstate = 7;
request->send(200, "text/plain", "Front function started"); }); // server.on("/dance", HTTP_GET, [](AsyncWebServerRequest *request)
// {
// actionstate = 7; // 设置标志,执行舵机动作
// request->send(200, "text/plain", "Front function started"); });
server.on("/free", HTTP_GET, [](AsyncWebServerRequest *request)
{
freestate=true;
request->send(200, "text/plain", "Front function started"); });
server.on("/offfree", HTTP_GET, [](AsyncWebServerRequest *request)
{
freestate=false;
request->send(200, "text/plain", "Front function started"); });
server.on("/histate", HTTP_GET, [](AsyncWebServerRequest *request)
{
emojiState = 0; // 设置标志,执行舵机动作
request->send(200, "text/plain", "Front function started"); });
server.on("/angrystate", HTTP_GET, [](AsyncWebServerRequest *request)
{
emojiState = 1; // 设置标志,执行舵机动作
request->send(200, "text/plain", "Front function started"); });
server.on("/errorstate", HTTP_GET, [](AsyncWebServerRequest *request)
{
emojiState = 2; // 设置标志,执行舵机动作
request->send(200, "text/plain", "Front function started"); });
server.on("/engine1offsetleftpwm", HTTP_GET, [](AsyncWebServerRequest *request)
{ request->send(200, "text/plain", String(engine1offsetleftpwm)); });
server.on("/engine2offsetleftpwm", HTTP_GET, [](AsyncWebServerRequest *request)
{ request->send(200, "text/plain", String(engine2offsetleftpwm)); });
server.on("/engine3offsetleftpwm", HTTP_GET, [](AsyncWebServerRequest *request)
{ request->send(200, "text/plain", String(engine3offsetleftpwm)); });
server.on("/engine4offsetleftpwm", HTTP_GET, [](AsyncWebServerRequest *request)
{ request->send(200, "text/plain", String(engine4offsetleftpwm)); });
server.on("/engine1offsetrightpwm", HTTP_GET, [](AsyncWebServerRequest *request)
{ request->send(200, "text/plain", String(engine1offsetrightpwm)); });
server.on("/engine2offsetrightpwm", HTTP_GET, [](AsyncWebServerRequest *request)
{ request->send(200, "text/plain", String(engine2offsetrightpwm)); });
server.on("/engine3offsetrightpwm", HTTP_GET, [](AsyncWebServerRequest *request)
{ request->send(200, "text/plain", String(engine3offsetrightpwm)); });
server.on("/engine4offsetrightpwm", HTTP_GET, [](AsyncWebServerRequest *request)
{ request->send(200, "text/plain", String(engine4offsetrightpwm)); });
server.on("/engine4offsetrightpwm", HTTP_GET, [](AsyncWebServerRequest *request)
{ request->send(200, "text/plain", String(engine4offsetrightpwm)); });
server.on("/batteryVoltage", HTTP_GET, [](AsyncWebServerRequest *request)
{ request->send(200, "text/plain", String(batteryVoltage)); });
server.on("/batteryPercentage", HTTP_GET, [](AsyncWebServerRequest *request)
{ request->send(200, "text/plain", String(batteryPercentage)); });
server.on("/speed", HTTP_GET, [](AsyncWebServerRequest *request)
{ request->send(200, "text/plain", String(speed)); });
server.on("/speedup", HTTP_GET, [](AsyncWebServerRequest *request)
{
speed++; // 设置标志,执行舵机动作
request->send(200, "text/plain", "Front function started"); });
server.on("/speeddown", HTTP_GET, [](AsyncWebServerRequest *request)
{
speed--;
request->send(200, "text/plain", "Front function started"); });
server.on("/engine1offsetrightpwmup", HTTP_GET, [](AsyncWebServerRequest *request)
{
engine1offsetrightpwm++; // 设置标志,执行舵机动作
request->send(200, "text/plain", "Front function started"); });
server.on("/engine1offsetrightpwmdown", HTTP_GET, [](AsyncWebServerRequest *request)
{
engine1offsetrightpwm--;
request->send(200, "text/plain", "Front function started"); });
server.on("/engine1offsetleftpwmup", HTTP_GET, [](AsyncWebServerRequest *request)
{
engine1offsetleftpwm++; // 设置标志,执行舵机动作
request->send(200, "text/plain", "Front function started"); });
server.on("/engine1offsetleftpwmdown", HTTP_GET, [](AsyncWebServerRequest *request)
{
engine1offsetleftpwm--;
request->send(200, "text/plain", "Front function started"); });
server.on("/engine2offsetrightpwmup", HTTP_GET, [](AsyncWebServerRequest *request)
{
engine2offsetrightpwm++; // 设置标志,执行舵机动作
request->send(200, "text/plain", "Front function started"); });
server.on("/engine2offsetrightpwmdown", HTTP_GET, [](AsyncWebServerRequest *request)
{
engine2offsetrightpwm--;
request->send(200, "text/plain", "Front function started"); });
server.on("/engine2offsetleftpwmup", HTTP_GET, [](AsyncWebServerRequest *request)
{
engine2offsetleftpwm++; // 设置标志,执行舵机动作
request->send(200, "text/plain", "Front function started"); });
server.on("/engine2offsetleftpwmdown", HTTP_GET, [](AsyncWebServerRequest *request)
{
engine2offsetleftpwm--;
request->send(200, "text/plain", "Front function started"); });
server.on("/engine3offsetrightpwmup", HTTP_GET, [](AsyncWebServerRequest *request)
{
engine3offsetrightpwm++; // 设置标志,执行舵机动作
request->send(200, "text/plain", "Front function started"); });
server.on("/engine3offsetrightpwmdown", HTTP_GET, [](AsyncWebServerRequest *request)
{
engine3offsetrightpwm--;
request->send(200, "text/plain", "Front function started"); });
server.on("/engine3offsetleftpwmup", HTTP_GET, [](AsyncWebServerRequest *request)
{
engine3offsetleftpwm++; // 设置标志,执行舵机动作
request->send(200, "text/plain", "Front function started"); });
server.on("/engine3offsetleftpwmdown", HTTP_GET, [](AsyncWebServerRequest *request)
{
engine3offsetleftpwm--;
request->send(200, "text/plain", "Front function started"); });
server.on("/engine4offsetrightpwmup", HTTP_GET, [](AsyncWebServerRequest *request)
{
engine4offsetrightpwm++; // 设置标志,执行舵机动作
request->send(200, "text/plain", "Front function started"); });
server.on("/engine4offsetrightpwmdown", HTTP_GET, [](AsyncWebServerRequest *request)
{
engine4offsetrightpwm--;
request->send(200, "text/plain", "Front function started"); });
server.on("/engine4offsetleftpwmup", HTTP_GET, [](AsyncWebServerRequest *request)
{
engine4offsetleftpwm++; // 设置标志,执行舵机动作
request->send(200, "text/plain", "Front function started"); });
server.on("/engine4offsetleftpwmdown", HTTP_GET, [](AsyncWebServerRequest *request)
{
engine4offsetleftpwm--;
request->send(200, "text/plain", "Front function started"); });
server.on("/speedup", HTTP_GET, [](AsyncWebServerRequest *request)
{
speed++; // 设置标志,执行舵机动作
request->send(200, "text/plain", "Front function started"); });
server.on("/speeddown", HTTP_GET, [](AsyncWebServerRequest *request)
{
speed--;
request->send(200, "text/plain", "Front function started"); });
server.on("/dowhatstate", HTTP_GET, [](AsyncWebServerRequest *request)
{
emojiState = 3; // 设置标志,执行舵机动作
request->send(200, "text/plain", "Front function started"); });
server.on("/lovestate", HTTP_GET, [](AsyncWebServerRequest *request)
{
emojiState = 4; // 设置标志,执行舵机动作
request->send(200, "text/plain", "Front function started"); });
server.on("/sickstate", HTTP_GET, [](AsyncWebServerRequest *request)
{
emojiState = 5; // 设置标志,执行舵机动作
request->send(200, "text/plain", "Front function started"); });
server.on("/yunstate", HTTP_GET, [](AsyncWebServerRequest *request)
{
emojiState = 6;
request->send(200, "text/plain", "Front function started"); });
server.on("/time", HTTP_GET, [](AsyncWebServerRequest *request)
{
emojiState = 8;
request->send(200, "text/plain", "Front function started"); });
server.on("/weather", HTTP_GET, [](AsyncWebServerRequest *request)
{
emojiState = 7; // 设置标志,执行舵机动作
request->send(200, "text/plain", "Front function started"); });
server.on("/connect", HTTP_POST, [](AsyncWebServerRequest *request)
{ // 获取POST参数:ssid、pass、uid、city、api
String ssid = request->getParam("ssid", true)->value(); String pass = request->getParam("pass", true)->value(); String uid = request->getParam("uid", true)->value(); String city = request->getParam("city", true)->value(); String api = request->getParam("api", true)->value(); // 打印接收到的参数
Serial.println(ssid);
Serial.println(pass); // 保存WiFi信息到JSON文件
DynamicJsonDocument doc(1024);
doc["ssid"] = ssid;
doc["pass"] = pass;
doc["uid"] = uid;
doc["city"] = city;
doc["api"] = api;
fs::File file = SPIFFS.open(ssidFile, "w"); // 打开文件进行写入
if (file) {
serializeJson(doc, file); // 将JSON内容写入文件
file.close(); // 关闭文件
} // 更新全局变量
useruid = uid;
cityname = city;
weatherapi = api; // 开始连接WiFi
WiFi.begin(ssid.c_str(), pass.c_str()); // 发送HTML响应,告知用户正在连接
request->send(200, "text/html", "<h1>Connecting...</h1>"); });
server.on("/", HTTP_GET, [](AsyncWebServerRequest *request)
{ // 检查SPIFFS文件系统中是否存在index.html文件
if (SPIFFS.exists("/index.html")) {
fs::File file = SPIFFS.open("/index.html", "r"); // 打开index.html文件
if (file) {
size_t fileSize = file.size(); // 获取文件大小
String fileContent; // 逐字节读取文件内容
while (file.available()) {
fileContent += (char)file.read();
}
file.close(); // 关闭文件
// 返回HTML内容
request->send(200, "text/html", fileContent); return;
}
} // 如果文件不存在,返回404错误
request->send(404, "text/plain", "File Not Found"); });
server.on("/control.html", HTTP_GET, [](AsyncWebServerRequest *request)
{ // 检查SPIFFS文件系统中是否存在index.html文件
if (SPIFFS.exists("/control.html")) {
fs::File file = SPIFFS.open("/control.html", "r"); // 打开index.html文件
if (file) {
size_t fileSize = file.size(); // 获取文件大小
String fileContent; // 逐字节读取文件内容
while (file.available()) {
fileContent += (char)file.read();
}
file.close(); // 关闭文件
// 返回HTML内容
request->send(200, "text/html", fileContent); return;
}
} // 如果文件不存在,返回404错误
request->send(404, "text/plain", "File Not Found"); });
server.on("/engine.html", HTTP_GET, [](AsyncWebServerRequest *request)
{ // 检查SPIFFS文件系统中是否存在index.html文件
if (SPIFFS.exists("/engine.html")) {
fs::File file = SPIFFS.open("/engine.html", "r"); // 打开index.html文件
if (file) {
size_t fileSize = file.size(); // 获取文件大小
String fileContent; // 逐字节读取文件内容
while (file.available()) {
fileContent += (char)file.read();
}
file.close(); // 关闭文件
// 返回HTML内容
request->send(200, "text/html", fileContent); return;
}
} // 如果文件不存在,返回404错误
request->send(404, "text/plain", "File Not Found"); });
server.on("/setting.html", HTTP_GET, [](AsyncWebServerRequest *request)
{ // 检查SPIFFS文件系统中是否存在index.html文件
if (SPIFFS.exists("/setting.html")) {
fs::File file = SPIFFS.open("/setting.html", "r"); // 打开index.html文件
if (file) {
size_t fileSize = file.size(); // 获取文件大小
String fileContent; // 逐字节读取文件内容
while (file.available()) {
fileContent += (char)file.read();
}
file.close(); // 关闭文件
// 返回HTML内容
request->send(200, "text/html", fileContent); return;
}
} // 如果文件不存在,返回404错误
request->send(404, "text/plain", "File Not Found"); }); // 启动服务器
server.begin();
};这部分的代码较长,是所有WebServer的页面路由监听,与页面中按钮触发的url对应,这里的url务必检查仔细,如果不能对应就无法监听到页面请求是否触发,硬件也无法做出对应的响应。
另外,在/connect下还添加了写入信息到FS文件系统中的功能,只要每次开机执行读取就不需要重复配置网络信息了。
⑤读取FS系统保存的json文件
void loadWiFiConfig(){ if (SPIFFS.begin())
{
fs::File file = SPIFFS.open(ssidFile, "r"); if (file)
{ DynamicJsonDocument doc(1024);
DeserializationError error = deserializeJson(doc, file); if (!error)
{
String ssid = doc["ssid"];
String pass = doc["pass"];
String uid = doc["uid"];
String city = doc["city"];
String api = doc["api"];
useruid = uid;
cityname = city;
weatherapi = api;
WiFi.begin(ssid.c_str(), pass.c_str()); // 尝试连接WiFi,最多等待10秒
unsigned long startAttemptTime = millis(); while (WiFi.status() != WL_CONNECTED && millis() - startAttemptTime < 5000)
{
delay(500);
} // 如果连接失败,打印状态
if (WiFi.status() != WL_CONNECTED)
{
Serial.println("WiFi connection failed, starting captive portal...");
handleWiFiConfig(); // 启动强制门户
} else
{
Serial.println("WiFi connected");
timeClient.begin();
}
}
file.close();
}
}
}前面我们讲了在/connect路由监听下,添加了将信息保存的FS文件系统,那么,这里的loadWiFiConfig()方法就是读取FS文件系统的Json文件,并将数据同步到全局变量之中,这样就不需要每次开机进入配置页面配网了,程序会自动加载上次配网保存的信息,极为方便。
⑥运动状态
switch (actionstate)
{ case 0 /* constant-expression */: /* code */
break; case 1:
front(); // 执行一次舵机动作
actionstate = 0; break; case 2: left(); // 执行一次舵机动作
actionstate = 0; break; case 3: right(); // 执行一次舵机动作
actionstate = 0; break; case 4:
back(); // 执行一次舵机动作
actionstate = 0; break; case 5:
toplefthand(); // 执行一次舵机动作
actionstate = 0; break; case 6:
toprighthand(); // 执行一次舵机动作
actionstate = 0; break; case 10:
left90(); // 执行一次舵机动作
actionstate = 0; break; case 11:
right90(); // 执行一次舵机动作
actionstate = 0; break; case 7:
lie(); // 执行一次舵机动作
actionstate = 0; break; case 8:
sitdown(); // 执行一次舵机动作
actionstate = 0; break; case 9:
emojiState = random(0, 7); // 执行一次舵机动作
actionstate = 0; break; default: break;
}运动状态代码与前面的路由监听对应,之所以没有把动作函数直接写入路由监听的代码,这是因为会导致页面响应过久,导致页面无法加载或者触发程序死机然后重启。
为了避免这个情况发生,我们通过actionstate变量定义运动状态,然后再loop函数中判断。
这里选择的是switch,而并没有使用if-else,理论上对应顺序较长的数据switch性能略好,看个人喜欢,其实都可以用。
⑦前进运动
void front()
{ //+30C 2/3
servo2.writeMicroseconds(1500 + speed + engine2offsetleftpwm); servo3.writeMicroseconds(1500 - speed - engine3offsetleftpwm); delay(500-runtime); servo2.writeMicroseconds(1500); servo3.writeMicroseconds(1500); //-30C 1/4
servo1.writeMicroseconds(1500 - speed - engine1offsetrightpwm); servo4.writeMicroseconds(1500 + speed + engine4offsetrightpwm); delay(500-runtime); servo1.writeMicroseconds(1500); servo4.writeMicroseconds(1500); // 0C 2/3
servo2.writeMicroseconds(1500 - speed - engine2offsetrightpwm); servo3.writeMicroseconds(1500 + speed + engine3offsetrightpwm); delay(500-runtime); servo2.writeMicroseconds(1500); servo3.writeMicroseconds(1500); // 0C 1/4
servo1.writeMicroseconds(1500 + speed + engine1offsetleftpwm); servo4.writeMicroseconds(1500 - speed - engine4offsetleftpwm); delay(500-runtime); servo1.writeMicroseconds(1500); servo4.writeMicroseconds(1500); //+30C 1/4
servo1.writeMicroseconds(1500 + speed + engine1offsetleftpwm); servo4.writeMicroseconds(1500 - speed - engine4offsetleftpwm); delay(500-runtime); servo1.writeMicroseconds(1500); servo4.writeMicroseconds(1500); //-30C 2/3
servo2.writeMicroseconds(1500 - speed - engine2offsetrightpwm); servo3.writeMicroseconds(1500 + speed + engine3offsetrightpwm); delay(500-runtime); servo2.writeMicroseconds(1500); servo3.writeMicroseconds(1500); // 0C 1/4
servo1.writeMicroseconds(1500 - speed - engine1offsetrightpwm); servo4.writeMicroseconds(1500 + speed + engine4offsetrightpwm); delay(500-runtime); servo1.writeMicroseconds(1500); servo4.writeMicroseconds(1500); // 0C 2/3
servo2.writeMicroseconds(1500 + speed + engine2offsetleftpwm); servo3.writeMicroseconds(1500 - speed - engine3offsetleftpwm); delay(500-runtime); servo2.writeMicroseconds(1500); servo3.writeMicroseconds(1500);
}⑧ADC电量检测
// 对 ADC 数据多次采样并计算平均值float getAverageAdcVoltage() { long totalAdcValue = 0; // 多次采样
for (int i = 0; i < numSamples; i++) {
totalAdcValue += analogRead(A0); // 读取 ADC 数据
delay(10); // 每次采样间隔 10ms
} // 计算平均 ADC 值
float averageAdcValue = totalAdcValue / (float)numSamples; // 将 ADC 值转换为电压
return (averageAdcValue / 1023.0) * 1.0; // ESP8266 的参考电压为 1.0V}// 计算电池电量百分比的函数int mapBatteryPercentage(float voltage) { if (voltage <= minVoltage) return 0; // 小于等于最小电压时,电量为 0%
if (voltage >= maxVoltage) return 100; // 大于等于最大电压时,电量为 100%
// 根据线性比例计算电量百分比
return (int)((voltage - minVoltage) / (maxVoltage - minVoltage) * 100);
}与小车不同,机器狗不能像小车那样简单控制电机正反转,实现前进后退,这里需要观察四足动物,进行一些仿生模拟,用舵机模拟四足动物前进时的四足变化情况。下一章,我们就讲这个!
4.舵机校准
如何让机器狗麻溜滴【走起来】且不顺拐?
机器小狗使用360度舵机,其拓展性高,但不像180度舵机那样,可以直接控制旋转角度,所有我们需要进行舵机校准,确保舵机转速,角度均合适。
说明:刷入程序的舵机校准数据并不是通用的,这要根据自己的舵机情况进行调整。
精确校准
接着,请按一下步骤进行精调。
1.将所有脚固定到相同角度。 2.滑到校准页的底部,点击4次‘电机左转90度’。 3.找到转动大于360度或小于360度的脚,进行舵机补偿。
修改程序重新烧录
记录下认为合理的各个电机补偿值,修改程序的补偿定义,重新刷入程序,当然,不重新输入也可以,这个值是立即生效的。
但是为了能快速响应,避免重复刷写降低寿命,所以不会保存到FS文件系统,下次重启也不会被保留。

当然啦!其实更推荐使用180度版本,因为其自带限位器,为了便于大家DIY,原工程中,已开源了180度舵机的版本。可前往原工程查看!
开源网址:
https://oshwhub.com/course-examples/bot-dog开发文档:
https://wiki.lceda.cn/zh-hans/course-projects/smart-internet/eda-robot/eda-robot-introduce.html





评论