移动机器人路径规划算法研究及仿真平台的设计与实现

通过对这种基本算法的扩展,这一问题己经得到很好的解决。这一算法产生的路径是以牺牲安全、与最近障碍物的距离和路径的最优长度为代价的。
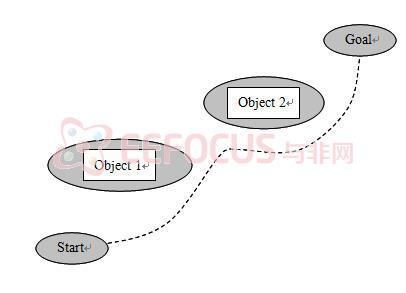
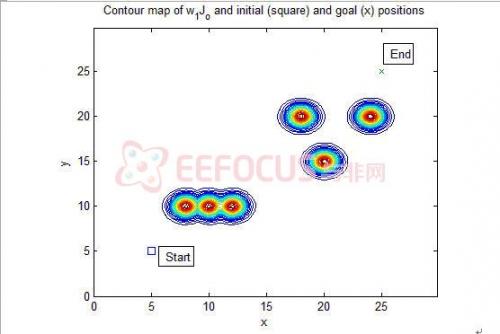
人工势场法机器人路径规划
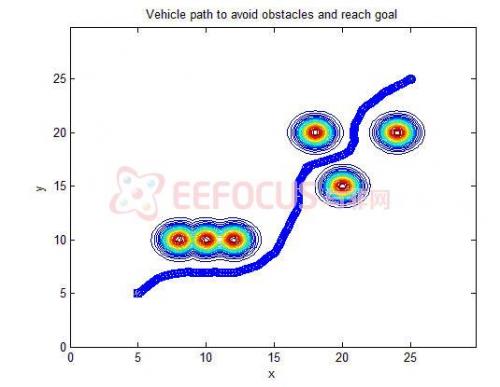
3、避障算法仿真结果
应用避障算法后,机器人运动结果:
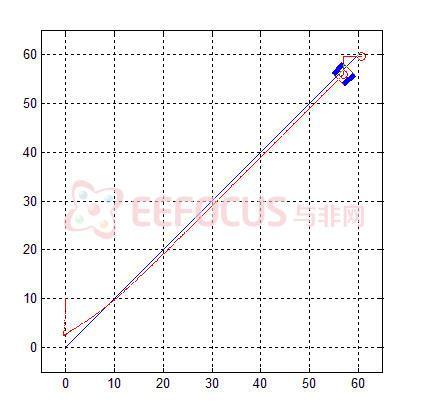
4、导航线循迹算法仿真结果
实例1:
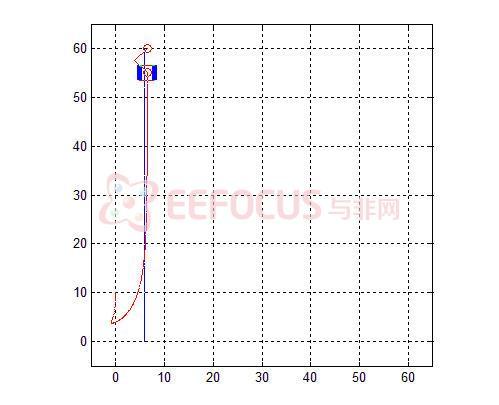
实例2:
成果二:智能小车(基于摄像头)导航
从2010年12月至2011年3月,我们设计并且制作了智能小车(AGV),用以完成该项目的导航线路径规划部分。
目前,我们已经将智能小车设计并组装完毕。并且已经完成了部分软件设计。目前小车能够通过摄像头采取到如下(第3部分)图片。使小车能够循线行驶。并且能将各传感器信息进行融合,从而达到较好的导航效果。
下面我将从三个方面进行成果展示,其一为赛道举例,其二为硬件电路设计,其三为摄像头采集图片示例。
- 赛道举例

- 硬件电路设计
驱动电路模块
利用以下驱动电路实现
利用两个BTS7960芯片,BTS7960是半桥驱动芯片,就是说需要2个芯片来驱动一个电机,电流最高43A,其内阻很小,所以散热不是很厉害。
电机的控制芯片。一般情况下用的有33886或者是BTS7960控制芯片,前者是电路中的全桥控制电路,就是说一片就可以完成变速和正转与反转。而后者是半桥控制电路,就是说一片只能完成变速,但是不能完成转向的切换,若需要换向时,可用两片BTS7960搭接成全桥电路即可。
其工作原理是由主控制芯片(一般情况下为单片机)根据加速或减速以及正转或反转的信息产生相应的PWM波形,而该PWM波形将会送人电机控制芯片,电机控制芯片将会产生相应的响应来改变电机两端的电压,从而实现变压调速。

评论