基于CAN总线结构的并联液压混合动力车控制系统

各节点控制器均能独立完成部分命令分解和调用底层指令的功能。这样,对于某一动作元而言,节点控制器将充当“命令主机”。下面以“液压系统运行调节”这一复合动作元执行时,1#,3#控制器流程图(如图4,图5所示)为例,说明各控制器在分布式控制系统中的作用。可以看出,在该指令执行过程中,3#控制器充当了1#控制器的“命令主机”。
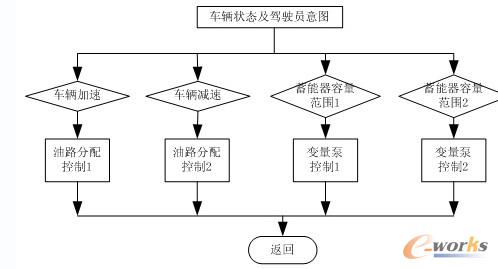

图4 1#控制器流程
采用分布式控制方式,可以将主机从繁琐的逻辑控制过程中解放出来,对于主机的小型化、产品化有重要作用。
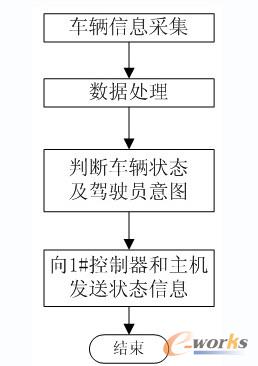
图5 3#控制器软件流程
4 系统的可靠性设计
硬件可靠性方面的工作很多,主要有以下两点:
(1)双时限看门狗:系统的每个节点控制器均采用了双时限看门狗电路。双时限看门狗有两个定时器:一个为短定时器(用单片机P80C592内带的),一个为长定时器(外部看门狗定时器MAX705)。短定时器定时为T1,长定时器定时为T2,0
这样,当程序进入某个死循环,如果这个死循环包含短定时器FeedDog语句而不包含长定时器FeedDog语句,那么长定时器终将溢出,使单片机复位。巧妙安排长定时器FeedDog语句的位置,可保证出现死机的概率极低。
(2)CAN总线系统的抗干扰性:为了增强CAN 总线节点的抗干扰能力,P80C592的CTX0和CRX0并不直接与82C250 的TXD和RXD相连,而设计为是通过高速光耦6N137后与82C250相连这样就很好的实现了总线上各CAN 节点间的电气隔离。应该特别说明的一点是,光耦部分电路所采用的两个电源是完全隔离的,否则采用光耦也就失去了意义。电源的完全隔离采用的是两个小功率DC/DC电源隔离模块。实现这些部分虽然增加了节点的复杂和成本,但是却提高了节点的稳定性和安全性。
82C250与CAN总线的接口部分也采用了一定的安全和抗干扰措施。82C250的CANH和CANL引脚各自通过一个5Ω的电阻与CAN总线相连,电阻可起到一定的限流作用保护82C250免受过流的冲击。CANH和CANL与地之间并联了两个30P的小电容,可以起到滤除总线上的高频干扰和一定的防电磁辐射的能力。
另外,每个节点控制器还配置了电源指示灯,总线数据收发指示灯,可在一定程度上让用户了解控制器的状况。
软件可靠性设计中,在各节点控制器程序中,每处需要等待的程序分支都设置了定时器。当规定时间内运行条件仍不能满足,控制器将取消当前任务,并向主机报警
5 结论
本文的创新点在于设计了采用CAN总线网络结构的液压混合动力车控制系统,构建了基于CAN总线的分布式电动车控制系统硬件平台,确定了系统的网络协议,并根据所提出的分布式结构设计了控制软件,最后对系统软硬件可靠性进行了设计。
根据本文所设计的串联式混合动力电动车控制系统已经在试验台上进行了试运行,并完成了各种功能测试。经试验证明,该控制系统性能稳定,工作可靠,对紧急指令的响应速度快,并能对历史数据进行保存,能够很好的满足液压混合动力车的运行需求。

评论