高压同步电机全数字化矢量控制变频器

pwm信号生成,根据dsp运算输出的的数据可编程逻辑器件用高速时钟生成数据,并进行单元串联的pwm波形移相,输出到光纤发送模块。
由于系统采用全数字化控制方式,所有的控制策略全由软件编程来实现,因而,软件的设计决定着整个系统的性能。控制策略采用转速、电流双闭环系统,其中转速环采用pi调节、电流环采用pi调节,算法由dsp数字信号处理器软件编程实现。速度环的输入是速度反馈和速度给定的差值,输出作为电流环的给定。电流环的输出来控制pwm波形生成器,所生成的pwm波形控制逆变器中功率开关器件的通断,以实现对电机的调速。整个软件处理系统采用前后台处理模式,程序的中断服务采用嵌套处理的形式,以保证整个系统实时信号的处理,中断源有4种,包括系统保护中断,片内电流环定时处理中断,速度环定时处理中断,外部通讯中断。
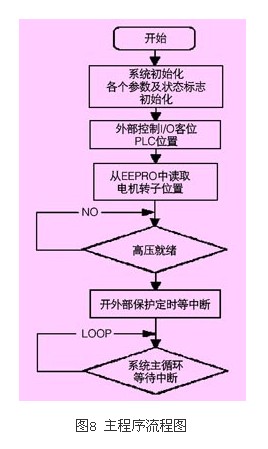
软件系统上电进行初始化,关中断清各种标志位,配置dsp的各个外设模块和i/o口,读取eeprom中的参数信息,计算电机的位置信号和电角度,延时检测高压上电否?进入系统主循环。
系统保护中断,检测单元模块的故障状态和系统的保护中断,在出现过流、过压、plc等故障时,系统关断igbt的输出并停机上报系统的故障信息。
系统主流程,系统上电后,对系统的ram空间和各项外设模块进行参数设定,对ram清零,接着对外部i/o和plc进行复位初始化,从eeprom中读取初始电机的转子定位信息,检测高压是否就绪,如就绪开放各种中断进入主循环,否则一直检测高压就绪状态信息,直到高压就绪,主流程如图8所示。
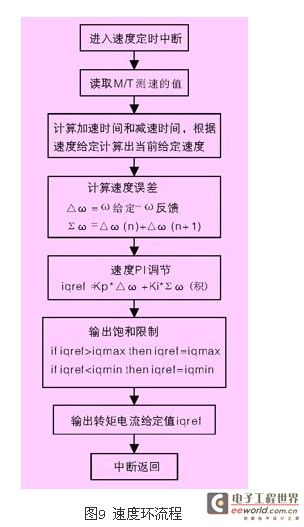
速度环与电流环中断处理,实时监测系统的转速信息,速度给定由人机界面设置输入,检测电机的运转状态和加减速时间的各项参数值计算出当前的速度给定,根据给定速度指令与速度反馈计算误差并进行pid调节,然后输出iqref,根据设定的转矩电流最大最小值限制iqref值,输出iqref到电流环做为转矩电流指令的给定,霍尔传感器检测ia,ic两相电流反馈值,计算出三相电流反馈值,根据位置速度传感器反的转子位置计算当前转子的位置电角度θ,由ia、ib、ic进行clarke输出iα和iβ,由iα、iβ进行park变换输出iq、id,根据速度环输出得转矩给定和去磁电流给定与反馈值求误差并进行pi调节输出vq、vd,由vq、vd进行park逆变换输出vα、vβ,由vα、vβ进行clarke逆变换输出va、vb、vc,输出三相va、vb、vcpwm的占空比值到fpga;驱动波形通过fpga的pwm波形发生模块输出到光纤驱动器,经光纤传输到各个功率单元模块控制igbt的开关。部分流程,如图9所示。
3 实验验证
上述的技术方案经过产品化后验证整个设计方案是可行的并在不同的设备上进行了技术测试和考核。
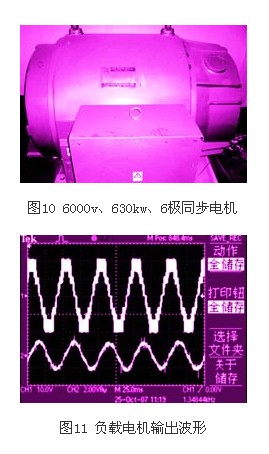
例一:试验设备6000v、630kw、6极的同步电机,在该设备上得到了测试验证,整个系统的运行频率低速可以达到0.01hz运行,高速可以达额定转速的1.5倍频率运行,低速转矩特性平稳,可以运行在0hz恒转矩,整个系统的功率因数可调,如图10,图11所示。
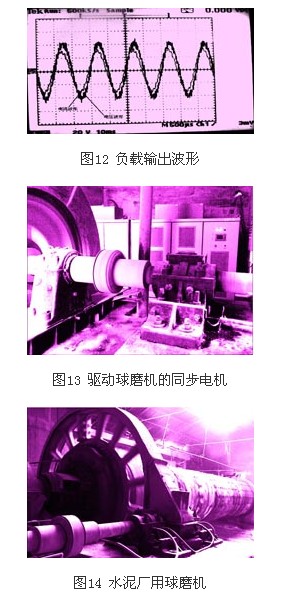
例二:试验设备6000v、630kw、36极的球磨机同步电机,图11是在球磨机同步电机负载上做实验的记录波形,在球磨机负载实验过程,系统在重载情况下启动,变频器的输出波形很平稳,系统的启动过程均匀加速,而且无冲击电流。从图12中可以看出电流超前于电压,系统运行在功率因数超前状态。而原来的球磨机同步电机起动过程是用水电阻启动,冲击电流大超过额定负载电流的3倍,对电网的危害较大,改成同步电机矢量控制变频器后有效的解决了启动运行问题。图13、图14示出了现场情景。
4 结束语
本文详细的叙述了如何实现高压同步电机矢量控制变频器,对矢量控制原理做了详细的阐述,如坐标变换、电流环控制、速度环控制、pwm系统拓扑结构等等。这种变频器的各项特点在实际负载上通过了试验验证。

评论