某型汽车电子控制器的模态仿真分析

3.4 材料参数
该型汽车电子控制器实物的总重205.4克,其中PCBA重为100.1克,壳体重为105.3克,有限元模型总重为 204.9克,其中PCBA模型重为99.5克,壳体模型重为103.9克,实物和有限元模型重量的相对误差为1.0%。为了简化计算,认为电路板具有一种等效材料参数,该等效参数是通过对PCB光板的拉伸试验和测量对其测密度得到的。同样认为较大的电器件也具有一种等效材料参数,其弹性模量和泊松比是参考普通芯片的材料得到的,密度是由芯片的总重量除以总体积得到的。各个部件的材料参数如表1所示。
表1:各部件的材料参数

3.5 仿真分析结果
利用Abaqus软件对该汽车电子控制器进行约束模态分析,得到的前三阶模态频率和模态振型如图9、图10、图11所示。第一阶固有频率为172Hz,第一阶振型为控制器沿两个安装耳中心点连线的前后振动;第二阶固有频率为262Hz,第二阶振型为控制器壳体上下面的相向的凸凹振动;第三阶固有频率为293Hz,第三阶振型为控制器壳体上下面的相对的凸凹振动。
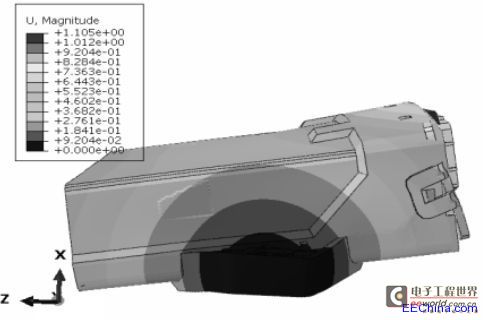
图9 :第一阶频率:172Hz
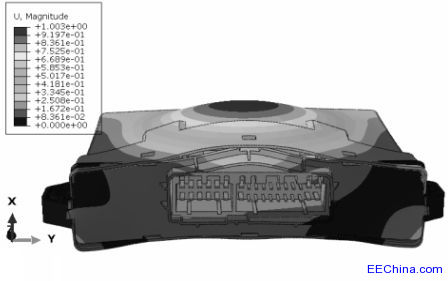
图10:第二阶频率:262Hz

图11:第三阶频率:293Hz
4 模态实验过程及结果
4.1 模态试验过程
利用美国PCB公司的压电式力锤和压电式加速度计进行激励、拾振。然后用LMS TEST.LAB 试验采集分析系统进行数据采集和分析。试验设置如下,采样频率为2048Hz,采样带宽为1024Hz,频率分辨率为0.125Hz,激励用力窗,响应是指数窗。
汽车电子控制器通过两个安装孔固定在基频大于500Hz试验台上。采用了5传感器布置方案(图12)进行模型试验。参照仿真分析结果发现,该传感器布置方案漏掉了第一阶扭转模态。而采用8传感器的布置方案(图13)能测得第一阶扭转模态。
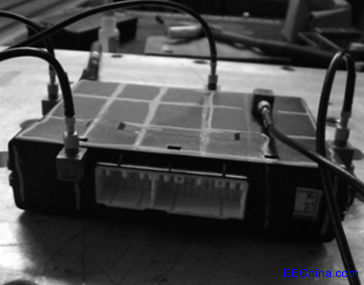
图12 :5传感器的布置方案
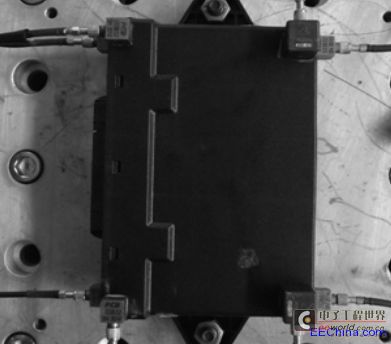
图13: 8传感器的布置方案
4.2 典型的实验结果
在5传感器的试验中,若干点的频率响应函数如图14所示。随意选取一个测试点的相干函数如图15所示。在有效带宽的范围内,相干函数接近1,可以判定频率响应函数的可信度比较高。在8传感器的试验中,若干点的频率响应函数如图16所示。
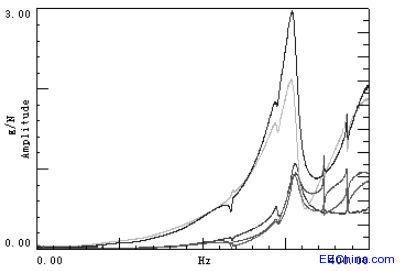
图14:若干点的频响函数
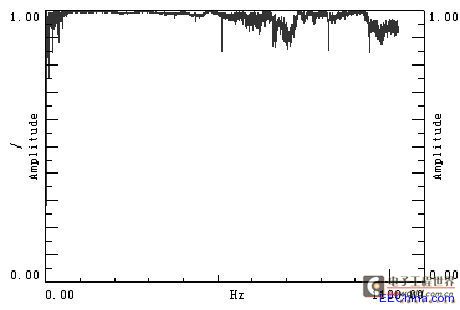
图15 :典型相干函数
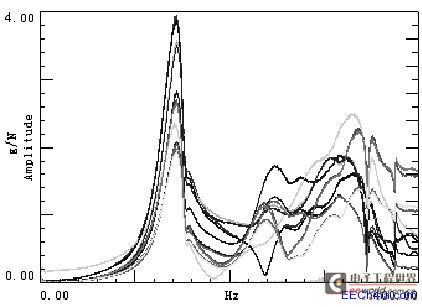
图16:若干点的频响函数
利用LMS TEST.LAB软件中的Time MDOF方法进行模态参数分析。根据所有测试点的频率响应函数之和建立稳态图,然后判定真实的模态频率、阻尼和参预因子。利用该方法测得的该控制器的前三阶模态频率和振型如图17-19所示。

评论