某型汽车电子控制器的模态仿真分析

图17:第一阶模态:146Hz
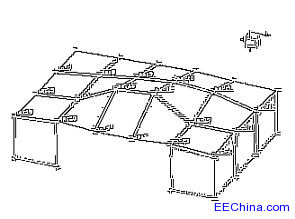
图18:第二阶模态:236Hz
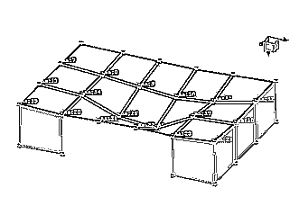
图19:第三阶模态:287Hz
5 计算和试验结果对比及分析
5.1 仿真和试验结果对比
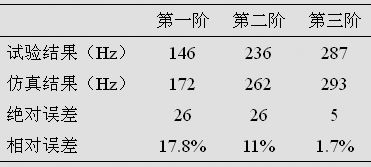
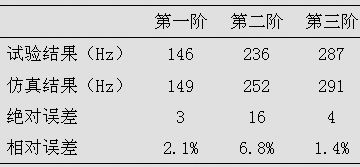
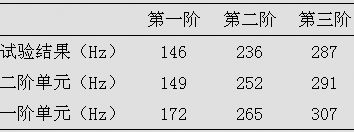
对比仿真分析和试验得到的前三阶振型,发现振型匹配很好;对比前三阶频率,发现最大相对误差将近20%,如表2所示。根据以上对比结果,可以判定该试验结果和仿真结果存在很大的误差。为了验证仿真分析方法是否可行,后文中将会对造成误差的原因进行分析。
表2:仿真结果与试验结果的对比表
5.2 传感器重量的影响分析
单个传感器的重量为5克,控制器上布置多个传感器时会引入很大的附加质量。于是在有限元模型中添加传感器的模型,并在考虑单元类型等因素的前提下,重新进行模态仿真分析,算得的固有频率和固有振型如图20~图22。
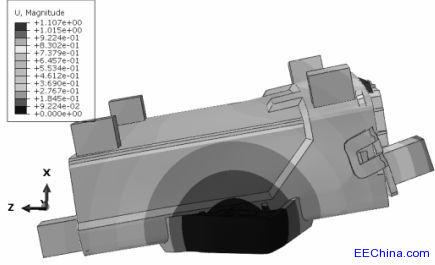
图20 :带传感器的第一阶模态:149Hz
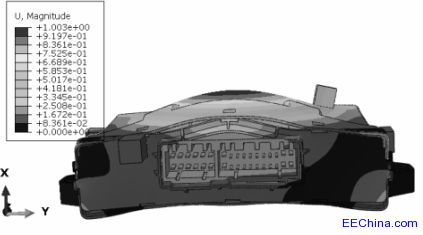
图21:带传感器的第二阶模态:252Hz
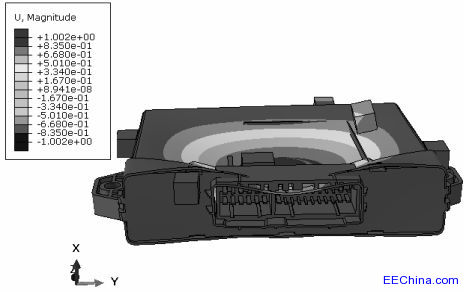
图22:带传感器的第三阶模态:291Hz
对比修正仿真分析和试验得到的前三阶振型,发现振型匹配很好;对比的前三阶频率,发现最大相对误差保持在6.8%以下,如表3。根据以上分析结果,可以判定传感器的重量是造成试验和仿真误差过大的主要原因。考虑传感器影响时,仿真分析的可信度能够达到93%以上,根据工程实际对可信度的要求,可以判定该仿真结果是控制器模态的真实反映。
表3:考虑传感器的仿真结果与试验结果的对比
5.3 单元类型的影响分析
本小节对一阶四面体单元是否适合在模态分析中使用进行验证。一阶四面体单元具有四个节点,边是直线,面是平面,加载变形后边和面仍要保持直线和平面。二阶四面体单元由十个节点,边可以是曲线,面可以是曲面,加载变形后边和面可以是曲线和曲面。所以用一阶四面体单元组成的网格模拟真实复杂的变形和应力场,具有一定的局限性。使用一阶四面体单元和二阶四面体单元对控制器下壳体进行约束模态分析。对比两种情况下算得的前三阶振型,发现振型一致;固有频率结果如表4,对比表4中的数据,发现用一阶四面单元算得的前三阶模态频率比二阶四面体单元算得的前三阶模态频率都要高,并且一阶四面体单元算得的模态频率更偏离实验结果。所以模态仿真分析不能使用一阶四面体单元。
表4:一阶四面体单元和二阶四面体单元对比
5.4 粘贴方式的影响分析
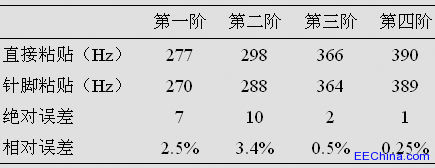
电器件直接面对面粘贴到PCB上的方式相比电器件针脚位置的单元粘贴到PCB上的方式会增大PCBA的局部刚性,对PCBA的自由模态有一定的影响。进行两种粘贴方式下的PCBA的自由模态分析,得到的模态频率如表5。对比两种粘贴方式下的模态频率发现,电器件直接面对面粘贴的方式的PCBA模态频率偏大,证明了较大电器件直接面对面粘贴到PCB上的粘贴方式增大了PCBA的局部刚性,使得模态频率变大。
表5:直接面面粘贴和针脚位置单元粘贴对比
6 结论
本文利用有限元软件对某型汽车电子控制器进行了模态仿真分析,并用模态实验验证了模态仿真分析结果的可信度,得到以下结论:
1、高质量的网格是仿真分析顺利进行的保障,并且能缩短仿真分析周期,要得到高质量的网格需去掉较小的倒圆角和圆孔,隐藏过密的曲线和硬点,切分不规则的几何体,忽略微小的电器件等;
2、对该类控制器进行了模态仿真分析时,不要使用一阶四面体单元,否则会导致模态频率偏大,可以使用一阶六面体单元(对其进行沙漏控制)和二阶四面体单元。
3、对该类控制器进行了模态仿真分析时,较大的电容、电阻、芯片及接插件等电器件不能直接面对面粘贴到PCB上,否则会增大PCBA的局部刚性,可以把较大的电容、电阻、芯片及接插件等电器件的针脚位置的单元粘贴到PCB上。
按照文中的仿真建模方法既能提高计算效率又能保障计算结果有93%以上的可信度。

评论