Cerebot MC7马达控制方案

-每路捕捉都有4字深度的FIFO缓冲
•输出比较(最多八通道):
- 一个或两个16位比较模式
- 16位无毛刺PWM模式
通信模块:
• 3线SPI(2个模块):
-帧支持简单编解码的I/O接口
-支持8位和16位数据
-支持所有串行时钟格式和采样模式
• I2C(2个模块):
- 完全支持多主从模式
- 7位和10位寻址
-总线冲突检测和仲裁
-集成信号调理
-从地址掩码
• UART(2个模块):
-检测到地址位时产生中断
-检测UART错误产生中断
-检测到启动位时将器件从休眠模式唤醒
- 4字符的发送和接收FIFO缓冲区
- LIN/J2602支持
-硬件IrDA编码和解码
-高速波特率模式
-使用CTS和RTS的硬件流控制
•增强型CAN(ECAN技术)2.0B
active版本(多达2个模块):
-多达8个发送缓冲区以及32个接收缓冲区
- 16个接收滤波器和3个屏蔽寄存器
-用于诊断和总线监视的环回模式、
监听模式和监听所有报文模式
-收到CAN报文时唤醒器件
-自动处理远程传输请求
-使用DMA的 FIFO模式
- DeviceNet寻址支持
-电机控制外设:
•电机控制PWM(最多八通道):
- 4个占空比发生器
-独立或互补模式
-可编程死区时间和输出极性
-边缘或中心对齐
-手动输出优先控制
-两个故障输入
-ADC转换的触发
-16位分辨率的PWM频率(40MIPS)
=1220Hz边沿对齐模式,610Hz中 心对齐模式
- 11位分辨率的PWM频率
(40MIPS)=39.1 kHz的边沿对齐模式,19.55 kHz的中心对齐模式
•正交编码器接口(QEI)模块:
- A相、B相和检索脉冲输入
- 16位上升沿/下将沿位置计数器
-计数方向状态
-位置测量(x2和x4)模式
-输入端的可编程数字噪声滤波器
-备用16位定时器/计数器模式
-位置计数器计满上/下溢中断
模拟/数字转换器(ADC):
•器件中最多两个ADC模块
• 10位,1.1 Msps或12位,500ksps的转换:
-两个,四个或八个同时采样
-最多32个带自动扫描的输入通道
-转换启动可手动进行或与4个触发
源中的一个同步进行
-休眠模式下也可进行转换
-积分非线性误差最大为±1 LSb
-微分非线性误差最大为±1 LSb
CMOS闪存技术:
•低功耗,高速闪存技术
•全静态设计
• 3.3V(±10%)工作电压
•工业级温度级和扩展级级温度
•低功耗
封装:
•100引脚TQFP(14mm×14mm×1mm和12mm×12mm×1mm)
• 80引脚TQFP(12mm×12mm×1mm)
• 64引脚TQFP(10mm×10mm×1mm)
• 64引脚QFN(9mm×9mm×0.9mm)
Cerebot MC7马达控制板
Cerebot MC7板是基于Microchip dsPIC 16位数字信号控制器的微控制器开发板。
Cerebot MC7主要是作为机电器件控制器,如,直流电机。该微控制器采用的是经过电机控制优化的dsPIC系列的dsPIC33FJ128MC706A。
Cerebot MC7具有4个半桥电路,其额定电压在5A时为24V。每一个半桥电路都连接到dsPIC A/D转换器,以测量闭环反馈控制的电压和电流。这些半桥可以用来控制两个有刷直流电机,两个两极步进电机,一个直流无刷电机,一个单极步进电机。此外,该板可用于实现开关DC/DC转换器的控制器。
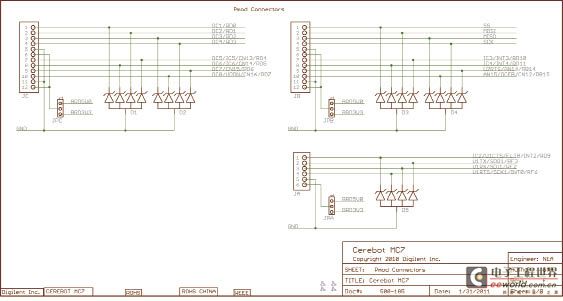
图3 Cerebot MC7马达控制板电路图(1)
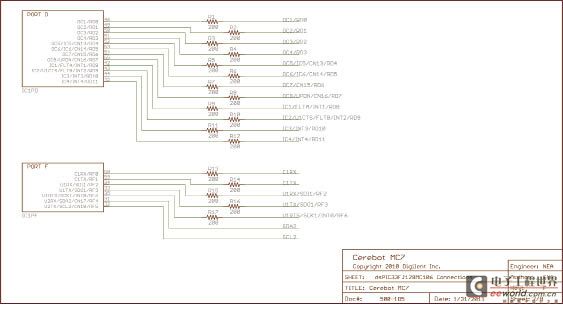
图4 Cerebot MC7马达控制板电路图(2)
Cerebot MC7马达控制板主要特性
• dsPIC33FJ128MC706A微控制器
•四个24V/5A带电流和电压反馈的半
桥式电路,并提供过电流中断
•电源电压最高24V
• 5V/4A开关电源
•集成的编程/调试电路
• CAN网络接口
•用于Digilent外设模块板的3个Pmod连接器
•八个RC伺服连接器
•两个I2C菊花链连接器
• 256kbits I2C EEPROM
•两个按钮和四个LED
•所有I/O引脚的ESD保护和短路保 护

评论