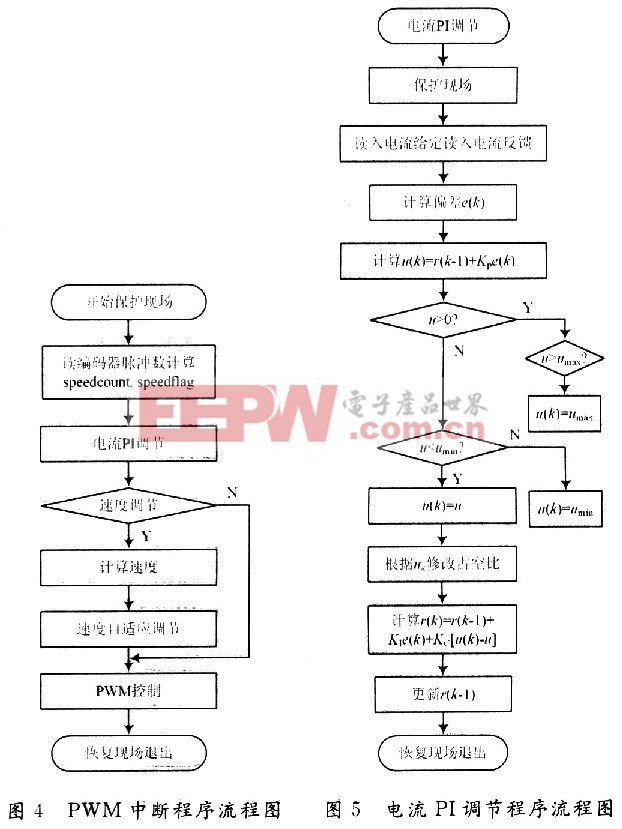
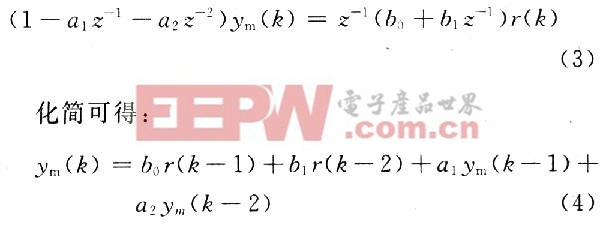
基于DSP控制系统的离散模型参考自适应算法在燃料电 作者: 时间:2010-12-07 来源:网络 加入技术交流群 扫码加入和技术大咖面对面交流海量资料库查询 收藏 <a href='https://ad.eepw.com.cn/www/delivery/ck.php?n=a635e61e&cb=INSERT_RANDOM_NUMBER_HERE' target='_blank'><img src='https://ad.eepw.com.cn/www/delivery/avw.php?zoneid=88&cb=INSERT_RANDOM_NUMBER_HERE&n=a635e61e' border='0' alt='' /></a> <a href='https://ad.eepw.com.cn/www/delivery/ck.php?n=a576c0a2&cb=INSERT_RANDOM_NUMBER_HERE' target='_blank'><img src='https://ad.eepw.com.cn/www/delivery/avw.php?zoneid=87&cb=INSERT_RANDOM_NUMBER_HERE&n=a576c0a2' border='0' alt='' /></a> 式中:KI=KP/τ;KC=KI/KP=T/τ,根据防饱和的PI调节器算法确定系统流程图如图5所示。2.5 速度自适应程序设计 速度自适应调节算法在图2中已经给出,该算法为离散自适应算法,可直接用于程序设计。离散模型参考自适应分为参考模型和被控对象两部分,所以首先讨论参考模型的实现。对于二阶参考模型其离散方程可表示为: 这样可以得到参考模型输出。被控对象速度输出y(k)由速度检测电路检测,可得预报误差:可得u(k)。根据以上分析编写速度自适应控制程序,流程图如图6所示。 上一页 1 2 3 下一页














评论