主动前轮转向控制技术研究

近年来,随着控制技术的发展,一种以往多用于电机控制的扰动观察器控制方法被移植到了车辆横摆角速度控制中。该控制方法的基本原理如图5所示,利用扰动观察器理论建立的反馈补偿器,通过反馈补偿器根据车辆包含扰动的实际横摆角速度生成一个补偿转角,叠加到车辆的输入转角上,从而实现对车辆横摆角速度的控制。反馈补偿器的表达式如下:
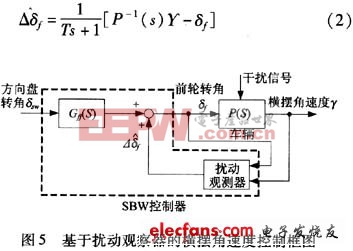
从表达式中可以看出,所谓的扰动观察器其实质是利用车辆的反向动力学传递模型,通过车辆的实际横摆角速度来计算车辆的名义前轮转角,进而通过与实际前轮转角求差来得到抵消横摆扰动的转角来进行控制。由于控制过程中横摆角速度信号会遇到噪声信号,故一般扰动观察器都带有一个低通滤波环节。低通滤波环节同时还有改变反向动力学模型分子分母阶次的作用,使其在控制上可以实现。基于扰动观察器的横摆角速度控制具有结构简单,含义清晰,对外界扰动和系统参数变化具有较强的鲁棒性特点。理论和实验证明扰动观察器的控制结构更适合进行横摆稳定性控制,成为未来横摆角速度控制发展的一个方向。2.2 D*控制
D*控制(或称为横摆角速度和侧向加速度的综合控制)源于四轮转向控制中对后轮转向的控制策略,是一种对车辆的横摆角速度和侧向加速度进行综合控制的方法。在该控制中,控制的反馈量不再只有横摆角速度,而是横摆角速度与侧向加速度的线性组合,如式(3)所示。
式中:Cy为侧向加速度,VY为车速与横摆角速度的乘积,两者量纲一致,从这里可以看出,D*控制是一种侧重于侧向运动控制的控制方法。
D*控制框图如图6所示,其中D*由理想车辆模型推出的与车速有关的比例系数与驾驶员输入的转角求得。CFF(s)为前馈控制传递函数,主要实现的是随车速改善车辆响应增益,CFS(s)为反馈控制环节,用来生成附加转角。
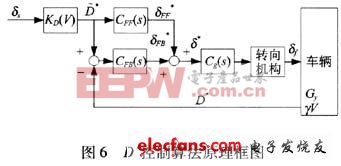
与横摆角速度反馈控制相比,D*控制可以进一步提高车辆的转向响应速度,在抑制扰动的同时,提高车辆轨迹跟踪的能力,在侧向运动要求比较高的工况下(如:低附着系数路面双移线,侧向阵风直线行驶)效果较好。
2.3 侧倾稳定性控制
在车辆行驶过程中,高速过弯、紧急避让和侧向阵风的干扰都有可能直接导致车辆侧翻,另外,重心偏高的车辆也特别容易发生侧翻。还有,当驾驶员对车辆的侧向稳定性做出错误估计时,也会导致车辆侧翻的发生。侧向加速度是影响车辆侧向稳定性的主要因素,通过主动转向可有效地影响车辆的侧向加速度从而控制车辆的侧倾。一般来说,车辆的防侧翻控制采用一个指示车辆侧倾状态的阙值,当检测到的侧倾状态超过阙值,则触发防侧翻控制。阙值可以是重心处的侧向加速度、车辆侧翻系数或者载荷转移系数等。
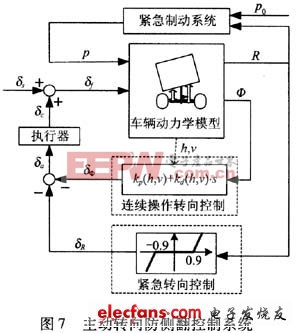
图7所示为基于主动转向和制动集成控制的控制系统图。图中只为侧翻系数,是由车辆的轮宽和簧载质量重心处的侧向加速度来求得。当,|R|1时,意味着车辆侧向稳定,而当R=±1时,则意味着车辆左侧或右侧的车轮将抬离地面。该控制有两种模式,当|R|0.9时,车辆正常行驶,控制系统处于连续操纵转向控制模式,附加转角根据对侧倾阻尼的优化策略产生,可以有效减小转向产生的侧倾,抑制处于车辆侧倾共振频带内的外界扰动。当,|R|≥0.9时,车辆处于侧倾危险状态,控制系统进入紧急转向控制模式,此时附加转角δR=kR(|R|-0.9),可以有效增大车辆转弯半径,同时系统进行一定的紧急制动操作,进一步降低车速,从而避免车辆发生侧翻。

伺服电机相关文章:伺服电机工作原理

评论