位置敏感探测器的信号噪声自适应抑制方法

其均方值(MSE准则函数)为
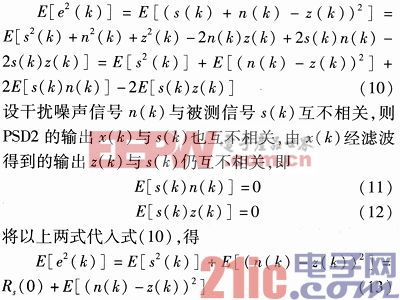
式中,Rs(0)表征被测信号s(k)的平均功率。对于平稳信号,其平均功率Rs(0)为常数,所以使ε(k)=E[e2(k)]达到最小,也即使E[(n(k)-z(k))2]达到最小,从而使z(k)趋向于n(k)。再由抵消器从y(k)中减去z(k),这样就从噪声n(k)中提取出了信号s(k)。
3.3 自适应FIR维纳滤波器
基于最小MSE准则,求加权系数向量h(k)的最优解的目的是使抵消器输出e(k)的均方值达到最小,也就是使准则函数ε(k)达到最小,这样就可以从观测到的信号y(k})中除去任何与x(k)相关的部分,剩余的e(k)只保留与x(k)不相关的部分,即
E[e(k)x(k-m)]=0,0≤m≤M-1 (14)
或 E[e(k)X(k)]=0 (15)
式(15)称为正交状态方程。
对于FIR横向滤波器,其加权系数向量为
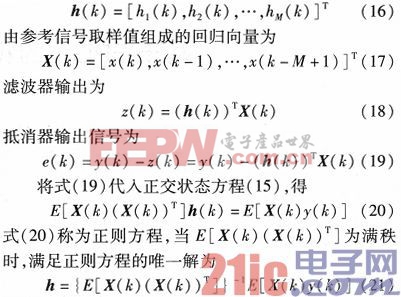
这个解称为维纳最优解,加权系数向量h(k)=h的滤波器叫作维纳滤波器。
4 结束语
自适应噪声抑制属于自适应信号处理的领域,它以干扰噪声为处理对象,利用噪声与信号不相关的特点,自适应地调整滤波器的传输特性,尽可能地抑制和衰减干扰噪声,以提高信号检测或信号传递的信噪比。本文引用地址:https://www.eepw.com.cn/article/192815.htm







评论