位置敏感探测器的信号噪声自适应抑制方法

2.2 光源、背景光及温度对PSD的影响
理论上讲,入射光点的强度和尺寸大小对位置输出均无关,但当入射光点强度增大时,信号电极输出的光电流也增大,有利于提高信噪比,从而提高器件的位置分辨率;通常PSD在使用时总存在一定强度的背景光,背景光的存在将影响器件的输出,消除背景光最简便的方法就是在PSD的感光面上加一个干涉滤光片,滤掉大部分背景光;环境温度的变化会影响器件的灵敏度和暗电流,这也会对PSD的位置分辨率带来一定影响。除此之外,光谱波长响应对PSD的具体运用具有较高的现实意义,对于特定的运用场合,设计PSD在特定的波段具有峰值响应,可以提高测试系统信噪比和测试精度。
3 PSD信号噪声自适应抑制方法
针对PSD的主要噪声来源及特点,提出了自适应噪声抑制的方法来提高PSD的位置分辨率。自适应噪声抑制属于自适应信号处理,不需要预先知道干扰噪声的统计特性,能在逐次迭代的过程中将自身的工作状态自适应地调整到最佳。该方法需要两块位置敏感探测器PSD1和PSD2 PSD1需要接受入射光斑照射,而PSD2不需要光斑照射,专门用来检测噪声源。自适应噪声抑制的原理框图如图2所示。本文引用地址:https://www.eepw.com.cn/article/192815.htm
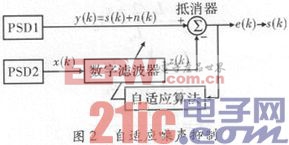
PSD2的输出经过参数可调的数字滤波器后,再送到抵消器,与PSD1的输出信号相减。插入滤波器的目的就是要补偿两片PSD的噪声差异,以使滤波器的输出尽量逼近PSD1感应的噪声。图2中的数字滤波器为参数可调的滤波器,自适应噪声抵消的其他环节也都以数字方式实现,所以图2中各变量的时间自变量都以取样序列号k来表示。
3.1 自适应滤波中的数字滤波器
自适应噪声抵消的核心部分是自适应滤波器,自适应滤波的过程就是用自适应算法调整数字滤波器的参数,以使滤波器输出z(k)逼近PSD1输出信号中叠加的噪声n(k),这样就可使抵消器的输出e(k)逼近被测信号s(k)。自适应数字滤波器主要包括有限冲激响应(FIR)横向滤波器和无限冲激响应(IIR)横向滤波器。由于IIR横向滤波器稳定性差,而且相位特性难以控制,这些缺点限制了它在自适应滤波和噪声抵消中的应用。FIR横向滤波器的结构如图3所示,其输入信号为x(k);输出信号为z(k)。图中z-1表示单位延时,延时线抽头出的信号分别为x(k),x(k-1),…,x(k-M+1),用向量可以表示为
X(k)=[x(k),x(k-1),…,x(k-M+1)]T (5)
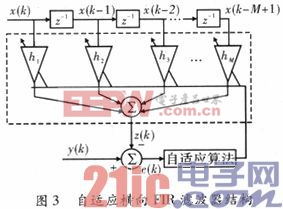
各抽头信号乘以各自的权重系数再相加就得到滤波器的输出信号z(k),这些权重系数分别为h1(k),h2(k),…,hM(k),用向量可以表示为
h(k)=[h1(k),h2(k),…,hM(k)]T (6)
滤波过程就是上述两个向量相乘的过程,即

3.2 最小均方误差(MSE)准则
各种不同的自适应算法取决于不同的准则函数ε(k),自适应滤波所采用的最优准则有最小均方误差(MSE)准则、最小二乘(LS)准则、最大信噪比准则、统计检测准则以及其他一些最优准则。其中应用最广泛的准则为最小均方误差准则,通常把根据最小均方误差准则建立的最优滤波器称为维纳滤波器。最小MSE准则是使抵消器的输出e(k)的均方值达到最小,即
s(k)=E[ e2(k)]=min (8)
ε(k)称为MSE准则函数。抵消器的输出为
e(k)=y(k)-z(k)=s(k)+n(k)-z(k) (9)







评论