基于CAN总线的仿人机器人力信息检测系统

选用TMS320LF2407作为主处理器。它采用实时信号处理体系结构,可达到30×106条指令/s的执行速度,供电电压为3.3V,功耗低,片内外设中集成有控制器局域网络(CAN)2.0B模块和SCI模块。
传输数据主要包括两个力/力矩传感器的五维力信息和经过预处理得到的数据,因此双端口RAM选用IDT7132(2K×8bit)。一个端口接PC/104总线的数据线、低位地址线、高位地址译码产生的选通信号以及读写信号,译码通过MAX7032,根据上位机的空闲地址分配RAM地址;另一个端口接经过电平转换的DSP数据线低位地址线、高位地址译码产生的选通信号以及读写信号,通过SN74LV08A译码,分配的地址为F800~FFFF,通过SN74LV245A完成总线驱动和电平转换。
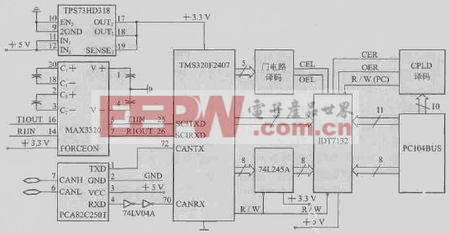
图4 接口电路原理图
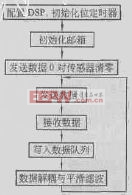
图5 力信息采集与预处理基本流程
选取PCA82C250T作为驱动CAN控制器和物理总线间的接口,提供对总线的差动发送和接收功能。同时利用DSP的SCI模块扩展了一路RS232串口,选用3.3V供电的RS232驱动器MAX3320作为串口驱动器,与PC机进行通信。
接口电路的软件流程
接口电路驱动程序中,首先对DSP进行初始化设置,包括定时器初始化和CAN模块初始化以及在IDT7132中设置平滑数据队列等;然后向发送邮箱中写入0或1,即对传感器清零或者请求发送数据;接收到数据之后,将数据从接收邮箱中读入平滑数据队列中,进行平滑数据处理,供上位机查询和读取。
在DSP的初始化设置中,首先通过设置MCR寄存器来配置CAN引脚;初始化位定时器主要是设置寄存器BCR1和BCR2,决定CAN控制器的通信波特率、同步跳转宽度、采样次数和重同步方式。对邮箱的初始化主要是设置邮箱的标识符;对发送的数据区赋初值,需要清零传感器返回值时,数据区赋值0,需要读取数据时,数据区赋值1。发送信息首先要使能发送邮箱,然后设置发送请求位,等待发送中断标志位置位,若为1,则发送成功,最后清除发送中断标志位和发送应答位。接受信息时,要对接收邮箱进行初始化,设置标识符以及与标识符相关的局部屏蔽寄存器(LAM);然后等待接收中断标志位MIFn置位,若MIFn=1则接收成功,最后清除接收中断标志位和接收信息悬挂位。接收数据后,根据传感器解耦矩阵完成数据解耦及平滑滤波。
根据文中提出的设计方法,已设计相应的电路,实现了对力信息的实时采集和传送。所设计的系统能够完成力信息采集和平滑预处理工作,但还没有加入对力信息的数字滤波设计。通过对所采集的力信息数据的特性分析,下一步将在软件流程中增加数字滤波部分,使获取的力信息能够更加真实地反映机器人所受到的地面反力信息,使力信息能够应用于仿人机器人的大回路控制。

电度表相关文章:电度表原理










评论