三相PWM整流器双闭环PI调节器的新型设计

根据系统仿真参数,取整流器放大倍数K = udc / 2= 150 ,分别代入式(4) 、(5) 得到Kip = 0. 1 , KiI = 150 。
图(6) 为电流调节器的波特图。在频率为50 Hz处,幅值变化0 . 025 dB ,相位滞后0. 51 deg ,幅值和相位的变化量都很小,证明电流内环PI 调节器参数设计合理。
根据式(4) 及所给的仿真参数,得到K1 = 5. 833 , TP =0. 0225 ,将ε= 0. 707 代入式(7) ,得到KuI = 2. 13 ,则KuP = TP KuI = 0. 048 ,图7 为电压外环PI 调节器的波特图,从图中可以看出,在50 Hz时,电压外环的带宽为12 Hz ,相角裕度γ= 42. 1°,工程上一般认为30°≤γ≤70°时,控制系统具有良好的动态性能,满足要求。
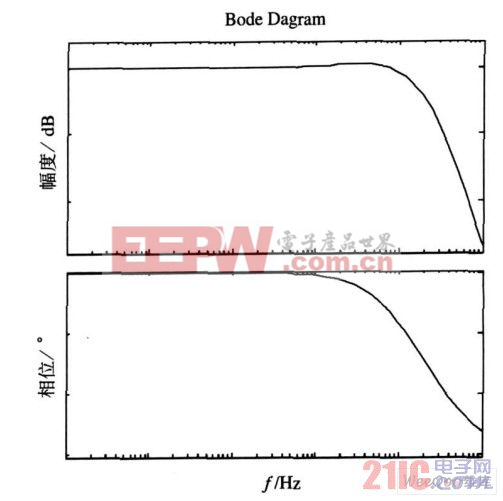
图6 电流调节器波特图
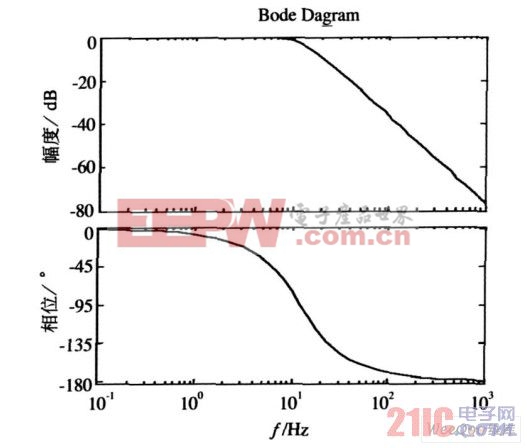
图7 电压调节器波特图
3. 2 PWM整流器的仿真
在0. 6 s时,负载电流发生突变,由图7 中得到,负载电流发生突变时超调量σ % = 0. 43 % ,超调量很小,恢复时间tv = 170 ms ,恢复时间很短,其他情况下直流电压很稳定。由图8 得到,网侧电流在负载波动后,动态响应快。图9 为网侧功率因数的仿真结果,可以看出,其功率因数达到了1 ,负载电流突变后功率因数经过瞬间的波动仍能达到1 。仿真结果验证了系统具有良好的动态和稳态性能。
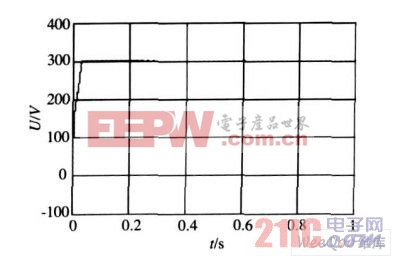
图8 直流输出电压仿真结果
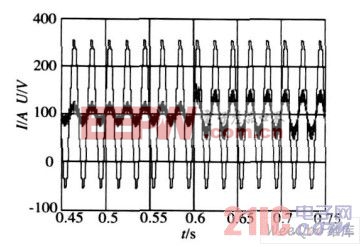
图9 网侧电压电流的仿真结果
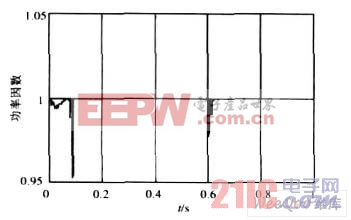
图10 网侧功率因数的仿真结果
4 结束语
本文在分析三相PWM 整流器数学模型的基础上,设计了具有前馈解耦控制的PWM 控制系统,分别根据控制要求设计了PI 调节器的参数。该设计方法简单易行,仿真结果表明系统具有良好的动态性能和稳态性能,验证了这种设计方法的优越性和正确性。

光敏电阻相关文章:光敏电阻工作原理
pwm相关文章:pwm原理

评论