一种三相四桥臂空间矢量脉宽调制方法

图4示出由三相电压参考获得逆变器4个桥臂调制波并产生PWM信号的计算流程图。本文引用地址:https://www.eepw.com.cn/article/175862.htm

可见,与基于a,b,c坐标系和基于α,β,γ坐标系的3D-SVPWM算法相比,新算法具有计算过程简洁且计算量小的显著优势,且输出的调制波与基于a,b,c坐标系的3D-SVPWM算法完全相同。
3 实验
为验证所提方法的有效性,搭建了一台三相四桥臂逆变器进行实验验证。三相四桥臂逆变器主要参数为:直流母线电压400 V;交流输出电压110V/50Hz;PWM开关频率4kHz;a,b,c相滤波电感6.2mH;第四桥臂滤波电感3mH;交流输出滤波电容15μF。实验结果如图5所示。
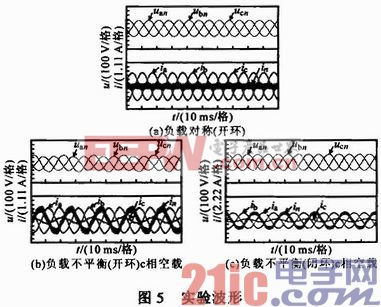
闭环控制采用了“比例+谐振”控制的电压单环形式且谐振频率为50 Hz。由图5可见,逆变器既能工作在开环状态又能工作在闭环状态,而且带平衡与不平衡负载时逆变器均能正常工作,尤其是逆变器采用闭环控制时,不平衡负载对输出电压影响很小。
4 结论
提出一种新的适用于三相四桥臂逆变器的3D-SVPWM简化算法,该算法将参考电压分为交流分量和直流分量两部分,用于计算三相桥臂和
第四桥臂调制波。与现有的3D-SVPWM算法相比,该算法具有计算过程简洁、计算量小的优点。实验结果证明了该方法的有效性。




评论