数字控制PFC电路的模型与环路设计分析


3.1.1 电流环补偿器的设计
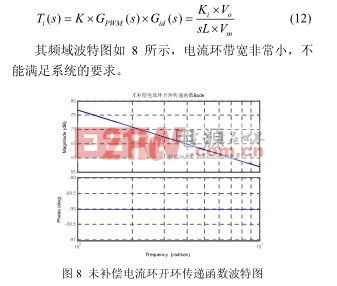
电流环通过调节MOS管来使输入电流跟踪输入电压从而得到正弦波形。由于电流基准信号为全波整流信号,电流反馈回路必须有足够的带宽来保证输入电流跟踪上参考信号。
在未加入补偿器时开环传递函数:
在理想情况下输入电感电流能快速准确的跟踪全波整流基准信号, 希望校正后的开环传递函数要满足:
1、低频时直流增益无限大,系统的稳态误差为 0;
2、中频段时尽可能大的带宽以实现快速跟随,以-20dB/dec 的斜率穿越 0dB 的, 并有足够的相位裕度保证系统稳定;
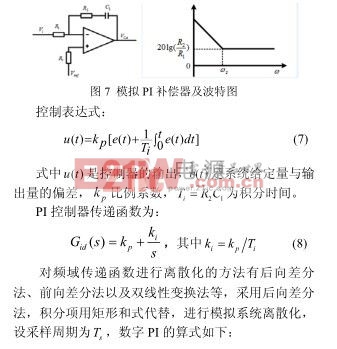
3、 在高频段, 开环传递函数呈衰减特性,抑制高频信号对系统的干扰。对于模拟的 PI 补偿器, 为使平均电流控制的电路稳定,电感电流向下的斜率乘以电路误差放大器的在开关频率的增益须与振荡器的斜波斜率相等此标准给出了电流补偿器在开关频率处得上限值,如果增益太高,电感电流斜率将会比振荡器斜率大,整个环路将会更加不稳定。因此设计原则:
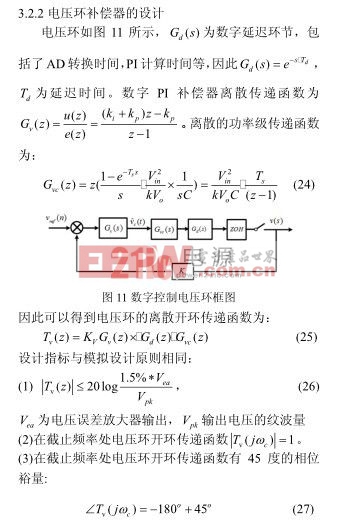
3.1.2 电压环数字补偿器的设计
电压环的带宽相对于开关频率太低,所以对带电压回路控制的主要目的是使输入失真达到最小,而不是用来提系统稳定度。由于输出电压中含有的二次谐波量,导致输入电流参考信号中出现三次谐波因此回 路的带宽必须足够小,才能减少输出电容上的线频率的二次谐波以低输入电流的调制量。因此设计原则:
(1)电压补偿器在 100 Hz 处的增益满足
3.2 数字 PI 控制器 Z 频域设计法
模拟设计方法由于忽略了回路中的延迟和零阶保持器,因此得到的参数并不精确。为获得更好的性能,设计数字 PI 控制器时, 利用模拟控制器的设计经验直接在离散 Z 域进行设计,但存在一定的近似性和不确定性。本文采用后向差分法进行 Z 变换,得到 PI 控制器在 Z 频域的传递函数,直接在 Z 域中进行零、极点配置或响应分析。
3.2.1 电流环补偿器的设计
对于数字控制出现的控制延时可等效为在前向通道串入延时环节,包含了 ADC 转换时间,计算时间、零阶保持器等, 其对数字控制系统的性能有很大影响。由于延时,系统的带宽被减小,在某些情况下,系统会发生振荡甚至失去稳定性。



dc相关文章:dc是什么
电子镇流器相关文章:电子镇流器工作原理








评论