将马达驱动器连接至PWM源的设计方法

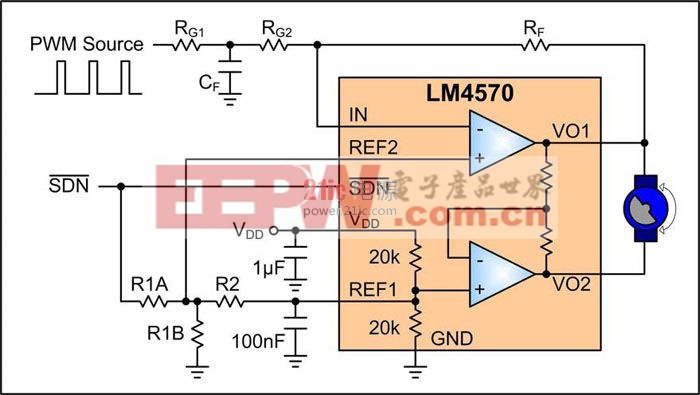
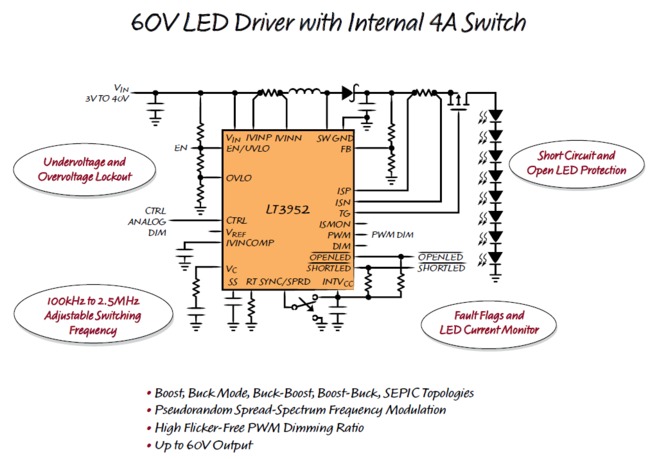
图1:具有PWM接口的LM4570马达驱动器
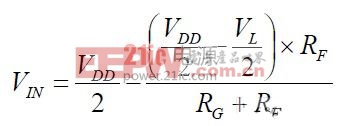
其中R1是与并联的R1A及R1B(形成这两个电阻器的分压)等效的阻抗。同样,假设PWM输入端的占空比为50%,且输出端与VDD/2平衡,则可得出IN端的电压计算式:
式6:
显而易见,式5与式6在形式上实际是相同的,因此我们可以发现,只需使R2等于RF,并使R1A与R1B为RG值的两倍即可。使用对称电路的一个好处是从计算式子中去除了VDD项,从而使得此电路对电池电压的变化不再敏感。
为了测试这些计算式,我们将使用具有下列参数的示例:VLOGIC=1.5V,VOUT(PEAK)=3.0V
为获得上述值,我们需要“增益”达到4。将RF选为200k并使用式3即可计算出RG等于100k,或RG1与RG2等于49.9k。由于这两个部分是对称的,将R2选为200k并再次使用式3即可计算出R1等于100k,或R1A与R1B等于200k。为了*估该电路的性能,我们对0%至100%的输入端占空比进行参数扫描,同时将电池电压从3.0V逐步增加至3.6V,直至4.2V。此外,我们使用蒙地卡罗(Monte Carlo)分析法检测电阻值以判断其敏感性(结果如图2中所示)。
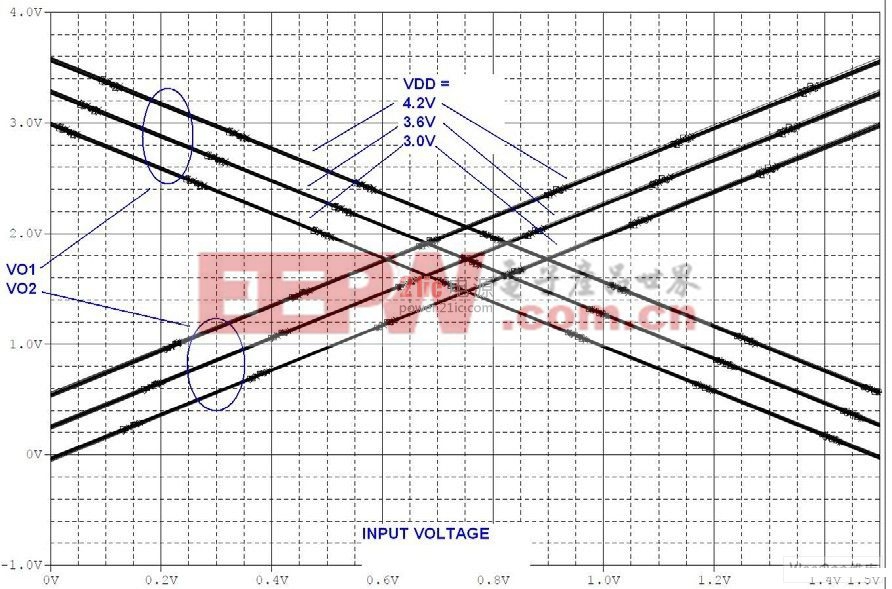
图2:模拟结果
如图2中所示,VO1与VO2两个输出端相互之间互补。请注意,这两个信号在50%占空比点或输入端上的0.75V处永远相交于零。即使当电池电压在其可用范围内变化时,也会在二分之一电池电压处相交。
图2中的模拟也是电阻器公差为1%的蒙地卡罗扫描。如图中所示,每条走线略微变宽,这表示仅对性能产生可以忽略的影响。
如图2中所示,VO1与VO2两个输出端相互之间互补。请注意,这两个信号在50%占空比点或输入端上的0.75V处永远相交于零。即使当电池电压在其可用范围内变化时,也会在二分之一电池电压处相交。
图2中的模拟也是电阻器公差为1%的蒙地卡罗扫描。如图中所示,每条走线略微变宽,这表示仅对性能产生可以忽略的影响。

pwm相关文章:pwm原理








评论