基于ARM的微波频率自动测量系统设计

由于微波信号在传输过程中受到外部干扰的噪声,线路的噪声,元器件的噪声等等,因此需要滤波电路来滤除这些干扰信号。由于处理器对信号的采集速率比较低,所以本系统采用了时间常数比较大的由R418和C409构成的低通滤波器。其截止频率为f p =30Hz有利于滤除电路中的尖峰噪声。电路采用两级运放,第一级为I/V转换,第二级为电压反相放大。调节可变衰减器,电机走完全程,观察到检波电流最大值为50.9μ A,因此电路中RF4=1K,R416=1K,RF5=45K,由Vout1=-RF4*I知,经过第一级I/V转换之后最大电压为50.9mV,再经过放大,最终输出电压最大为2.291V,满足S3C44B0的A/D转换输入要求。
4.软件设计
4.1 下位机软件
系统开机复位后,进入while(1)死循环,时刻检测上位机是否发来测量频率的命令,当接受到测量频率命令后,调用测频率模块子程序。频率测量子程序中,电机走完全程需要1854步,每一步带动谐振腔走0.005mm,每一步耗时44.44ms,电机每走动一步,把100次检波电流的A/D转换数据求平均值后再通过串口发送到上位机显示。
4.2 上位机软件设计
在虚拟仪器开发平台LabVIEW中,可以利用基于VISA的仪器驱动模板中的I/O接口函数来方便快速地开发驱动程序。本系统中通过PC机和主控芯片S3C44BO的RS232串行通信实现数据采集的驱动程序正是使用这种方法。
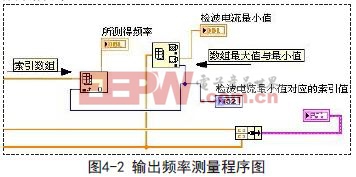
如图3-5频率测量的labview程序图。首先用最大值与最小值函数求出采集到的电流数据的最小值,并求出其对应的索引值,即步进电机在哪一步采集到的电流值,从而把这个索引值反馈回频率数组,求出其对应的元素,则为所测频率。
5.信号源输出频率测量实验结果及分析
为了在上位机的LabVIEW界面得到所测量的微波信号频率,需在界面中显示出检波电流--频率曲线,从而可明显读出检波电流的“吸收波谷点”.需通过定标法先手工测量频率--距离(当前测量点与起始点的距离,可由套筒刻度算出)的一组尽可能多的数据点,然后利用步进电机每走一步的距离,就可以把距离转化为步数,再用matlab拟合出频率--步数的关系函数。从而可知道步进电机走到哪一步对应哪一个频率。电机走完全程需要1854步,那么把步数对应的1854个频率值组成一个数组作为曲线的横坐标,并把采集到的1854个电流值作为纵坐标。
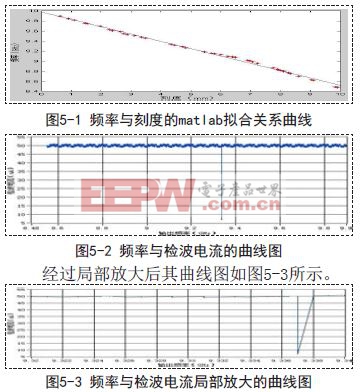
限于本信号源频率及谐振式频率计测量范围的影响,本系统只能在8.48GHz和9.9GHz范围内测量。因此从套筒的起始位置9.9mm(对应于频率8 . 4 8 G H z ),截止位置0 . 6 3 m m (对应于频率9.9GHz),其全长为9.9mm-0.63mm=9.27mm.由于电机带动套筒每步的距离非常小,因此不能直接测量步进电机一步的距离,利用步进电机没有累计误差的特点,采用步进电机走动180步,测出套筒刻度前后位置差,得出步进电机带动套筒每一步移动平均距离为0.005mm.手工测出频率与刻度的42组数据点,利用MATLAB拟合出图5-1所示曲线。用MATLAB拟合出频率f 与刻度L 线性关系函数为f = ?0.1456* L + 9.9917(0.63mm ≤ L ≤ 9.9mm)。由于电机每步带动套筒移动0.005mm,起始位置在0.63mm,即步进电机走一步后,套筒的位置在0.63mm+0.005mm=0.635mm,而步进电机走完全程需要1854步,套筒的截止位置在0.63+0.005*1854=9.9mm.则刻度L 与步数n 的关系函数为L = 0.005n + 0.63(0 ≤ n ≤1854)。
可推导出频率f 与步数n的函数关系式为f = ?0.000728n + 9.9(0 ≤ n ≤1854)。把步数对应的1854个频率值组成一个数组作为曲线的横坐标,并把采集到的1854个电流值作为纵坐标,利用PC机在LabVIEW描绘的波形图如图5-2所示。
再由LabVIEW自动计算检波电流最小值对应的频率值,如图5-4所示。可知这时信号源输出频率为9.337GHz.

与手工测量做对比。换上可直接测出频率的谐振式频率计,测得这时的频率为9.357GHz,所以自动测量与手动测量的相对误差为:
本系统设定步进电机走完全程需要82.4秒,不能设得走太快的原因是防止步进电机“丢步”(漏掉了脉冲没有运动到指定的位置)。另外太快很可能检测不到检波电流的“波谷点”.而手工测量一次信号源的输出频率,通常要两分多钟,可见本系统自动测量的实用性。

电子管相关文章:电子管原理









评论