基于CAN总线的智能继电器研究

3 电流信号的数据采集
系统电流信号的采集,文中采用的是美国国家半导体生产的8位分辨率、双通道A/D转换芯片。文中之所以使用该款芯片,主要是考虑到它的体积较小、兼容性强、性价比高,更为重要的是它的数据是串行输出,节约了单片机的管脚资源。
一般情况下,和单片通信的管脚由以下4个:片选端CS、时钟输入端CLK、数据输出端DO、模式选择输入端DI。通过对时序图的分析发现,DI和DO不是始终同时有效,因此在设计电路时,可以将此二管脚并接到一起作为一个管脚连接到单片机上。ADC转换流程大致如下。首先是使能选中芯片,即要拉低片选CS,并且要保持该电平到转换完毕,因为当CS置位的时候,该芯片是不能使用的;其次是要发送一个起始信号,这就需要在第一个时钟的下降沿到来之前拉高DI;再次是要输入通道选择控制字进行转换通道选择,通道控制的选择需要在接下来第2、3个脉冲下降沿来临之前输入两位数据文中先后对DI输入1,0;最后是从DO端输出AD转换结果,即在先在第4时钟下降沿到第11个时钟下降沿之间的每一个下降沿都会输出A/D转换结果,高位在前,共8位,接下来在从第11个时钟下降沿到第19个时钟下降沿的每个时钟下降沿又一次
输出和之前相反的数据,也是8位,只是这个时候是低位在前;最后便是拉高CS,禁止使能A/D转换,对该2个8位数据进行比对,将转换结果送到数据寄存器中。图5是ADC转换的流程图。
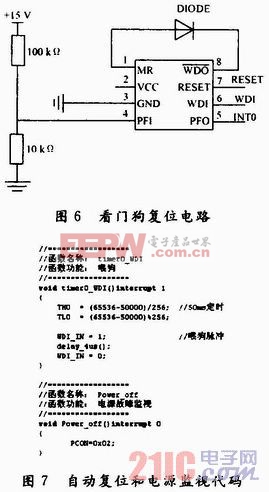
4 看门狗MAX813L
在单片机构成的系统当中,单片机的工作往往会受到来自外界干扰,导致程序陷入死循环,进而使得单片机无法正常工作,单片机的手动复位又有其局限性,为此文中采用专门监测单片机运行状态的芯片MAX813L。该芯片不仅能实现系统复位,还可以监测电源状态,当出现掉电或者低压等情况时保护重要数据。
4.1 系统复位
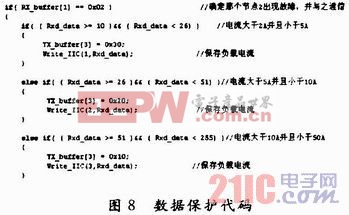
当系统受到某些干扰的影响,使得系统程序跑飞,当该芯片的看门狗信号输入端WDI在超过1.6 s时间内得不到清除定时器的脉冲时,看门狗输出管脚WDO将由高电平变为低电平,根据图6会发现,复位输入端MR会被拉低成低电平,当这个低电平保持时间在140 ms以上时,复位信号输出端RST会复位信号,从而复位CPU。根据前面分析,系统的正常运行需要最多以1.6 s的时间间隔给看门狗输入端输入脉冲。文中使用定时器0的工作方式1每隔50 ms给看门狗芯片一个清定时器脉冲。喂狗的实现代码如图7所示。
4.2 电源监视
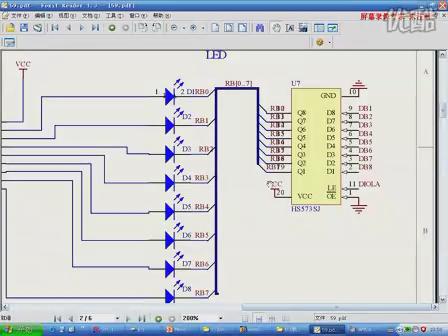
当电源故障输入管脚的电位低于1.25 V时,电源故障输出端的电平会由高变低,导致微处理器P32管脚的电平发生变化,进而触发外部中断0,执行中断服务程序,即冻结寄存器的内容,保存RAM中的数据,激活掉电模式,进入掉电工作状态。要想退出掉电模式,系统必须复位。电源监视的部分代码如图8所示。

继电器相关文章:继电器工作原理
时间继电器相关文章:时间继电器







评论