基于捷联惯性导航的组合导航系统研究


1.2 系统的状态方程
本系统取东北天坐标系为导航坐标系,以SINS导航参数误差作为系统状态变量X。
系统的状态方程为:

δKD]T,ψ为姿态误差角,δvn为系统速度误差,δp为位置误差,δKG为陀螺仪刻度系数误差,εb为东北天向陀螺零漂,δKA为加速度计刻度系数误差,△b为东北天向的加速度计的零偏,δpD为里程计的位置误差,δKD为里程计的刻度系数误差。F(t)为系统状态变量的系数矩阵。G(t)为系统噪声系数矩阵,w(t)为系统噪声矩阵,它是均值为零、方差为Q的白噪声矢量。
1.3 观测方程的建立
SINS与里程计的自主式组合导航系统采用速度组合方式时,里程计的速度量测值经过刻度系数误差及姿态误差角修正后分解到导航坐标系,与SINS的速度量测值进行对比,构成卡尔曼滤波器的观测量,利用卡尔曼滤波技术进行误差估计和校正,具体的系统量测方程为:

式中:v(t)为量测噪声矢量,它是均值为零、方差为R的白噪声矢量,且假设v(t)和w(t)是互不相关的。
2 实物试验的结果及分析
水下试验使用的是装有组合导航系统并且顶部带有标杆的导航试验车。环境是一个200 m2的水池,试验车全程约20 min,速度约为0.1 m/s,以水池东向位置的中心为起点,以东向位置为基准,每隔5 m记录试验车的位置数据。
记录数据如表1所示。
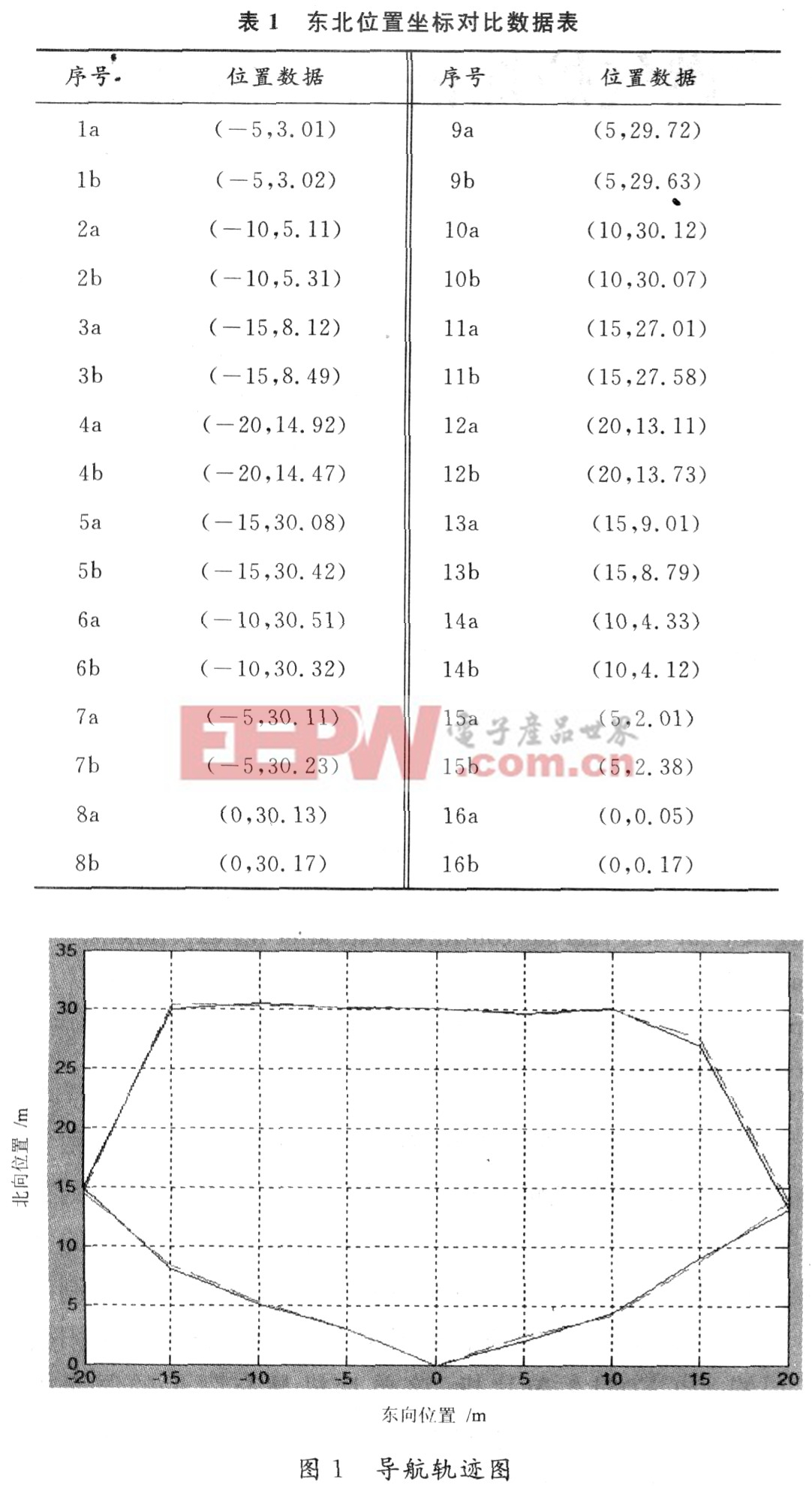
表1中:a组数据为组合导航系统采集得到的位置坐标数据;b组数据为试验车顶部标杆测得的位置坐标数据。
根据表1中的数据绘制的导航轨迹图如图1所示。
图1中,黑色实线是依据惯导组合采集试验车的位置数据绘制的;红色虚线是依据试验车顶部标杆测量得到的试验车的位置数据绘制的。根据表1中的数据获得北向位置误差数据如表2所示。

根据表2中的数据得到组合导航系统的最高北向位置误差O.62 m,可以得出利用里程计来辅助SINS进行导航能够使系统达到较高的定位精度。
3 结 语
SINS/0D组合导航系统,能解决SINS导航位置误差随时间明显累积的缺点。组合导航系统具有较好的定位功能,且有较强的抗干扰能力和自主性,该自主式组合导航系统对水下轮式车辆的导航有一定的实用价值。







评论