复杂路线下机器人的三点三轮寻迹系统

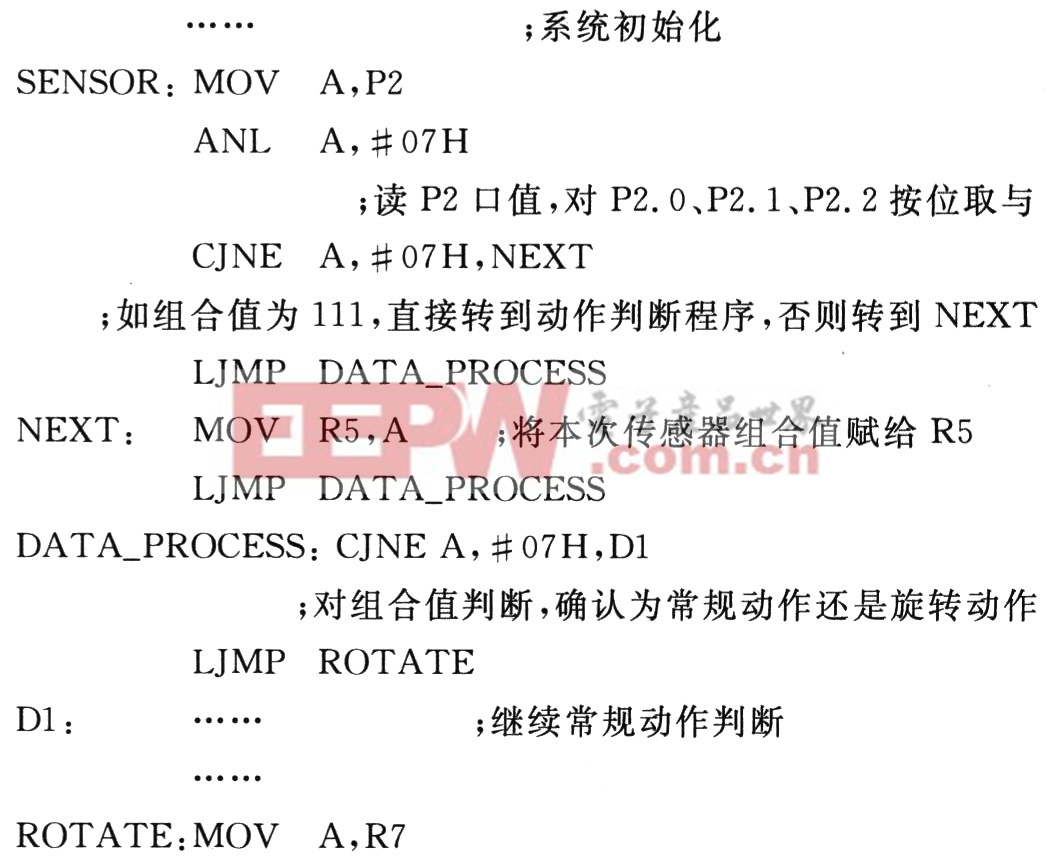
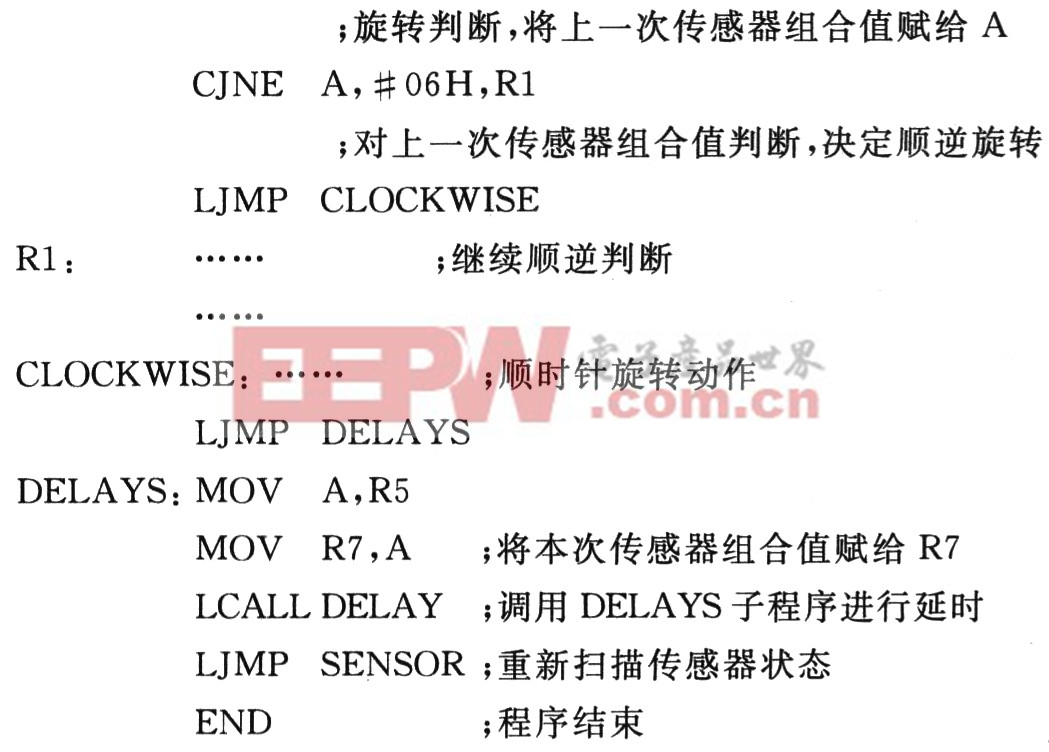
为了进一步提高系统的安全性和可靠性,还需增加异常处理算法。可能出现的异常情况有:过小弯道或小角度折道时,机器人还来不及转过弯来,就已经完全偏离黑线。这种情况下,3个传感器都输出“1”,检测不到黑线,若不及时处理,机器人将无法继续寻迹。针对该情况,设计了原地旋转动作来找回预定路线,不过原地旋转有顺、逆时针之分,因此还得区分开来。改进后编程的思路为:每次读取P2口值之前,将其上一次的传感器组合值存入某个寄存器,当出现组合值为 “111”的情况时,立即查询上一次的值,根据该值,可以判断出机器人是从哪一侧偏离黑线的,从而进行顺或逆时针原地旋转。其主要程序如下:
结语
根据上述设计思路,我们制作出寻迹机器人并进行了测试。测试场地如图4所示,黑色导引线宽度为3 cm,黑线周围区域均为白纸覆盖。测试结果表明:该寻迹机器人能在此复杂路线下平稳、顺利地沿着黑线走完全程,并在终点沿原路返回,达到了预期的目标。这为进一步研究复杂环境下的自动行走机器人提供了参考。

本文的创新点为:使用3个自制的红外光电传感器,以简单的设计和较少的硬件实现了复杂路线下机器人的寻迹。而基于该机器人双级转弯的设计思想,可以增加传感器数量、组成传感器阵列来实现多级转弯,从而对机器人的自主寻迹有着更为精确的控制。










评论