dsPIC3F3013的CAN息线数据采集系统

MCP2515的SPI接口支持0,0和1,1运行模式。外部数据和命令通过SI引脚传送到器件中,且数据在SCK时钟信号的上升沿传送进去,在SCK的下降沿通过SO引脚传送出去。CS片选引脚设置为低电平后,MCP2515希望收到的第一个字节是指令/命令字节,这就要求在调用一个命令时,要先把CS 引脚拉升为高电平然后再降低为低电平。使用装载TX缓冲器指令,取消了一般写命令所需的8位地址,只需选择地址指针设置的6个地址之一,便可快速地将数据写入发送缓冲器。
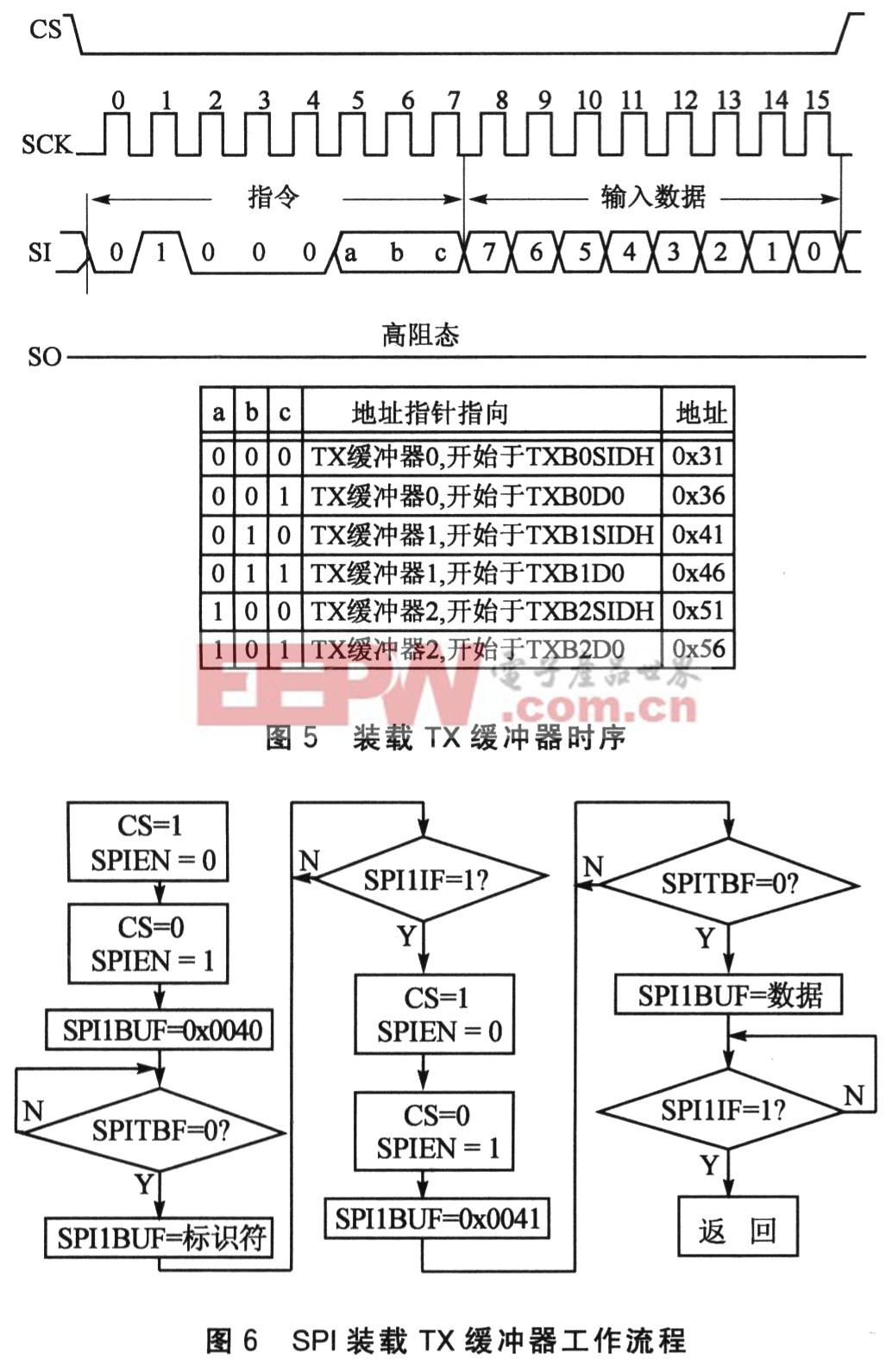
下面以MCP2515的装载TX缓冲器为例来说明数据的发送过程。装载TX缓冲器的时序如图5所示。本应用有3路信号,每一路信号都要求精确到小数点后2 位,所以经过处理后的数据格式使用浮点型。一个浮点数需要占用4字节,为了使监控中心易于管理,用包含4字节数据长度的标准数据帧来发送数据。现以装载 TX缓冲器0为例说明一次数据发送操作,如图6所示。本文引用地址:https://www.eepw.com.cn/article/163565.htm
dsPIC30F3013的SPI模块在数据发送和接收时有8位和16位两种工作模式可选。MCP2515的SPI指令、内部寄存器地址及数据都是8位的,所以在初始化SPI模块时,清零MODE16(SPI1CON10>),将通信数据配置为8位宽度。
结 语
本文介绍了一种以Microchip公司dsPIC30F3013为控制核心,以MCP2515为CAN控制器和以MCP2551作为CAN收发器的数据采集系统。该系统与传感器组成一个CAN节点,有效地改善了工控系统中监控部分线路布局范围广、布线凌乱、抗干扰能力差的现状,同时,使整个监控系统更易于扩展。实践证明,这种设计是可靠的、高性能的。只是系统工作在多雷电地区时,可能会发生雷击事故,在后续设计中会使用高速光电耦合器在CAN控制器与 CAN收发器之间做隔离。












评论