基于SPCE061A智能小车机器人语音辨识系统的研究

3 基于SPCE061A的语音辨识系统在智能小车上的实现
智能小车的语音控制系统以SPCE061A控制器和语音输入电路、语音输出电路为硬件基础,语音输入电路如图3所示,其中VMIC提供传声器的电源,VSS是系统的模拟地,VCM为参考电压,1脚和2脚分别是传声器X1的正极、负极的输入引脚,连接SPCE061A的MICP、NICN管脚上。当对着传声器讲话时,1脚和2脚将随着传声器输入的声音产生变化的波形,并在SPCE061A的两个端口处形成两路反相的波形,送到SPCE061A控制器内部的运算放大器进行音频放大,经过放大的音频信号,通过 ADC转化器转化为数字量,保存到相应的寄存器中。语音输出电路如图4所示,其中VDDH为参考电压,VSS是系统的模拟地。音频信号由SPCE061A 的DAC引脚输出送到电路的9端,通过音量电位器R9的调节端送到集成音频功率放大器SPY0030,经音频放大后,音频信号从SPY0030输出经J2 端口外接扬声器播放声音。本文引用地址:https://www.eepw.com.cn/article/163529.htm

SPCE061A配有专用的麦克接口用于语音训练和辨识阶段的语音输入,16位的定时/计数器用于语音信号的控制采样,内置的硬件乘法器和内积运算保证了辨识算法的运行。在软件方面,凌阳科技提供一个语音辨识函数库bsrv222SDL.lib,它能够完成特定人语音的连续辨识,包括训练函数和辨识函数,还可以将训练好的特征模型导入和导出等。
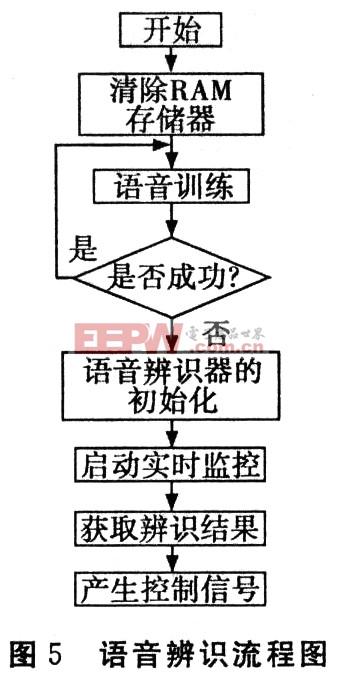
由于语音命令的特征模型要保存到RAM中,所以首先擦除SPCE061A中的RAM,与语音训练做准备。训练模式启动后,系统播放语音提示,提示用户语音训练已启动,接下来用户可按照系统提示依次对各条命令进行训练,在训练过程中,如训练成功则由语音提示进行下一条命令进行训练,若失败,也会提示用户继续训练此条语音,全部命令训练完毕后系统将准备进行语音辨识;当向控制器发出语音命令时,声波通过麦克端口输入,将相应的信号传递到SP-CEO61A处理芯片,经编解码电路和数字信号处理后,在芯片中通过相关程序与预先植入的语音库中的命令进行比较辨识,根据辨识的结果进行判断,转换为能被系统辨识的信号,从而对被监控系统进行控制。语音辨识的过程如图5所示。










评论