模糊控制在基于CAN总线的数据采集与控制系统中的应用


若某时刻的偏差为 ,偏差变化率为
,偏差变化率为 ,则得到相应的控制量为:
,则得到相应的控制量为:

当式(2)遍历所有的控制规则后可得到总的模糊控制规则表,如表2所示。

系统输入变量的隶属函数采用三角形隶属度函数,模糊判决采用最大隶属度原则,积分环节的加入与否由式(1)决定,若加入积分环节则合并该分量得到相应的控制增量Δu。
3 模糊控制算法实现
3.1 硬件实现
考虑到大规模过程控制系统的分散性和信息的多样性,采用了现场总线中的CAN总线把各个子系统有机地联系起来,实现了集中管理和对各现场设备实时?有效的控制。其硬件电路图如图3所示。
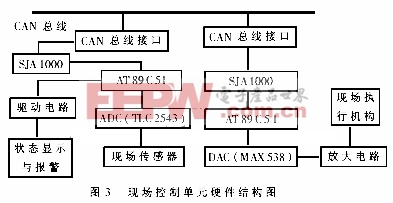
现场控制单元以AT89C51芯片为核心,主要负责对现场设备状态的显示与报警、对采集来的数据进行处理和对SJA1000进行操作、控制。其中SJA1000为CAN总线微控制器,主要把从AT89C51来的信息以CAN总线协议的格式发送到CAN总线上以供其它部分使用,并从CAN总线上接收有用信息提供给AT89C51作进一步的处理。本系统的A/D和D/A转换电路分开设计主要是因为一个大系统下的各个子系统之间是有联系的,某一子系统采集到的数据可能正是另一子系统作进一步处理的依据,而不是自身的需要。这样,就使各智能单元之间数据通信更为方便、快速,也便于上位机管理。该硬件电路中采用了DC-DC转换电路和多种光电隔离器件,采用了看门狗(Watchdog)复位技术,其目的主要是为了防止现场干扰信号过大而破坏核心电路以及保证系统在环境比较恶劣的情况下也能正常运行。











评论