基于DSP仿人机器人关节控制器设计

线形光耦HCNR201只能起到隔离电流的关系,且输入电流和输出电流呈线性关系。U6B是图3芯片LM358中的另外一片运算放大器,它将输入0~10 V电压转换成20 mA以内的电流信号,输入线形光耦HC-NR201。HCNR201输出电流再经过一个由单电源轨到轨运放AD8519构成的电压跟随器转换成0~10 V电压信号,作为驱动器的模拟信号输入。显然,HCNR201两侧电路应采用不同的电源和地。LM358中的两片运算放大器采用控制器输入的12 V电源供电,而AD8519则采用驱动器输入端提供的10 V电压供电。
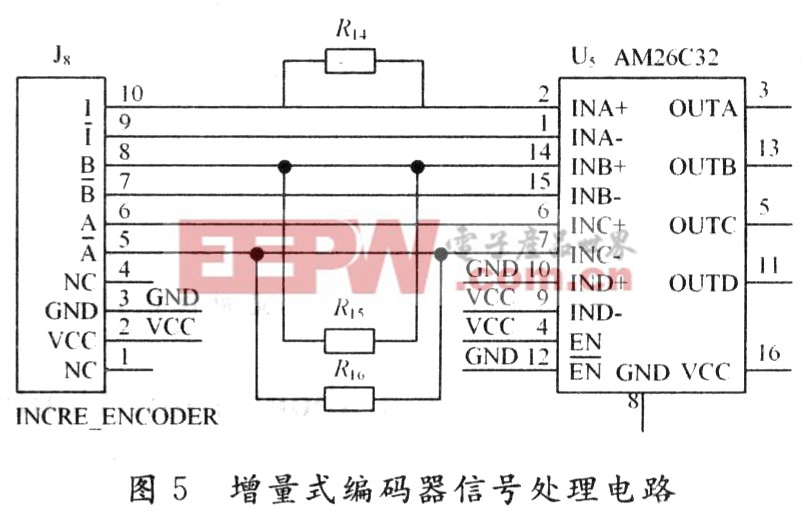
1.3 增量式编码器信号处理电路
增量式编码器信号处理电路如图5所示。J8是MR编码器的信号输入接口,采用AM26C32把MR编码器输出三个通道的RS 422差分信号转换成TTL电平,得到A,B,Z三路信号。本文引用地址:https://www.eepw.com.cn/article/163470.htm
1.4 RS 485总线通信电路
RS 485总线是一种通信总线,TMS320F240 DSP芯片本身不具备RS 485总线接口,采用两个485通信芯片MAX485可以的把TMS320F240的串口RXD和TXD的TTL电平转换为RS 485电平,TMS320F240DSP的RXD和TXD引脚分别连接到第一片485通信芯片RO和第2片485通信芯片DI的引脚。TMS320F240 DSP 的SPISIMO和SPISOMI连接到MAX485的使能引脚RE,用于控制TMS320F240 DSP芯片的数据发送口挂接到总线上或和总线分离,电路如图6所示。


pid控制器相关文章:pid控制器原理










评论