基于LIN总线的车灯控制系统设计

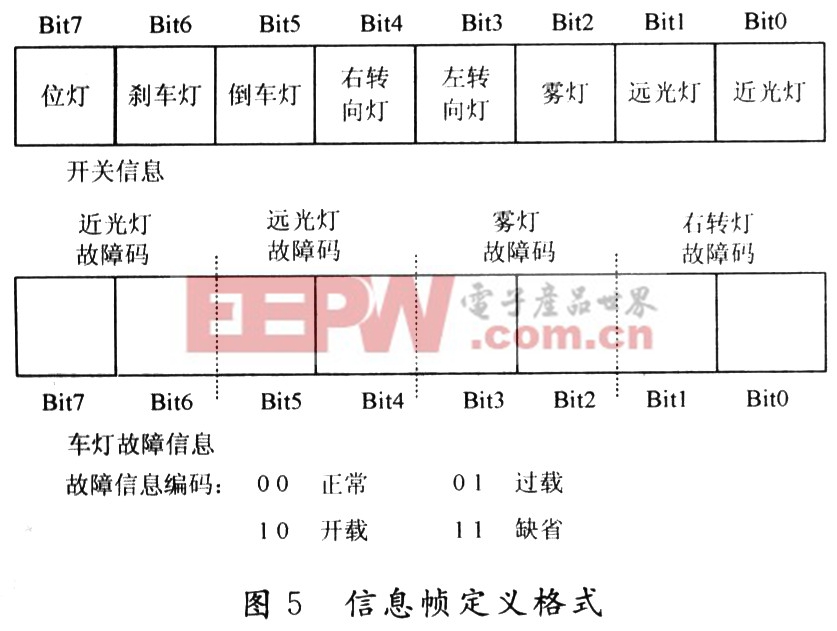
LIN网络主机节点包含主机任务,负责对报文传输进行调度。LIN通讯协议中没有定义仲裁机制,因此任何从机任务想要发送报文必须通过主机任务的调度:主机任务发送报文头,标识符匹配的从机任务发送响应帧。LIN网络中每一个节点都包含从机任务。主机节点中的从机任务负责将车灯的开关信息发送给各从机节点,接收来自从机节点的响应帧;从机节点中的从机任务负责将从机检测到的故障信息发送给主机节点,接收主机节点发送的开关信息。开关信息,和故障信息各占用一个字节从属LIN报文帧的数据场,其定义格式如图5,其中开关信息占用一个数据字节,包含所有的车灯开关信息,逻辑“O”表示相应位中车灯开关闭合,逻辑“1”表示相应位中车灯开关断开;每个从机节点的车灯故障信息占用一个数据字节,图5中显示的是右前方车灯的故障信息,故障信息的编码如图中所示。本文引用地址:https://www.eepw.com.cn/article/163369.htm
3.2 车灯负载智能驱动软件设计
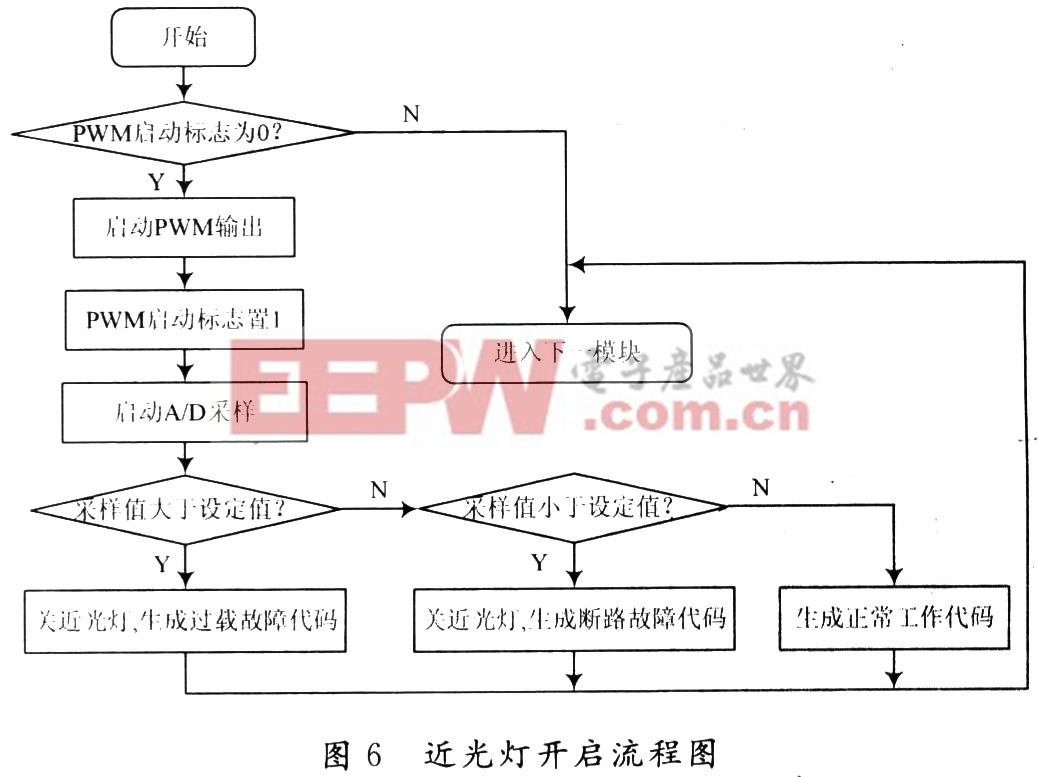
车灯负载故障最容易发生在开启的一瞬间,为了减少大灯(近光灯)开启时的瞬间电流过冲,延长大灯的使用寿命,在开启时采用PwM控制方式,开启时逐步提高PWM占空比直到100%,使近光灯的电压逐步上升到电源电压,近光灯的控制开关采用BTS6143D芯片,其内部集成的电流反馈功能,能根据实际通过车灯的电流输出一个与之成正比的反馈电流,图3中反馈引脚IS端的外围电路设计是将电流输出转换为O~5V电压输出供从机MCU的A/D采样。在系统运行时根据命令开通控制开关后,将启动A/D实时采集电压反馈,如果采样值低于设定值则认定为车灯断路故障,如果采样值大于设定值则认定为过载或短路故障,从机MCU将迅速关闭开关以保护该器件,并生成相应的故障信息待主机询问时将其反馈给主机节点,主机节点解码故障信息并通过发光二极管显示出来。近光灯的软件设计流程如图6所示。
3.3 抗干扰冗余软件设计
汽车运行时的工况极其恶劣,发电机的供电电压在较大范围内波动以及发动机点火瞬间高频电磁干扰等对车身网络系统而言都是很大的干扰;汽车使用过程中,由于线路绝缘磨损或者接插件不可靠等因素,可能出现LIN子节点从网络中断开或者短路等情况。据此,将总线故障划分为瞬间干扰故障和永久性故障,并进行了相应的可靠性冗余设计:在硬件上采用汽车级的高性能芯片,在软件通讯设计上对子节点的命令及状态信息采取反馈机制:主机将开关信息发送给各从机节点后,启动500 ms定时器,计时时间到后主机依次询问各子节点,请求其反馈各自的状态信息。在这种机制下,一旦子节点在通讯中出现:没有反馈命令和状态;数据帧校验和错误;子节点接收到的命令与主节点发送的命令不一致等情况,主节点马上重新发送命令,确保各个子节点信息接收的正确性。如果某一个从机节点长时间没有反馈信息,则可认定此节点已从网络中丢失,主机节点生成相应故障信息,并通过发光二极管显示出来;如果LIN总线与地短接,LIN总线一直成显性状态(低电平状态),则主机不能接收到任何从机节点的反馈信息,主机将关闭LIN收发器,保护此器件,并将故障显示给驾驶员。
4 结 语
提出一个基于LIN总线的车灯控制系统方案,实验证明总线化的控制系统方案较传统的集中式控制方案具有布线简单,结构清晰,不同控制模块间的独立性强,便于以后的系统检修及系统的升级扩展等优点,具有一定的可行性。










评论