单相逆变器多环反馈控制策略分析

根据上面的函数表达式,作出的闭环根轨迹如图4所示。图4中虚线部分是电压瞬时值反馈控制的根轨迹,实线是本文所采用的复合控制的根轨迹图。图4(a)和图4(b)分别是轻载和满载的轨迹图。从图4中可以看出,本文所采用的控制方案由于在开环传递函数中引入的附加零点,使闭环系统的根轨迹远离虚轴,大大增加了系统的稳定性。而且

3 仿真与实验
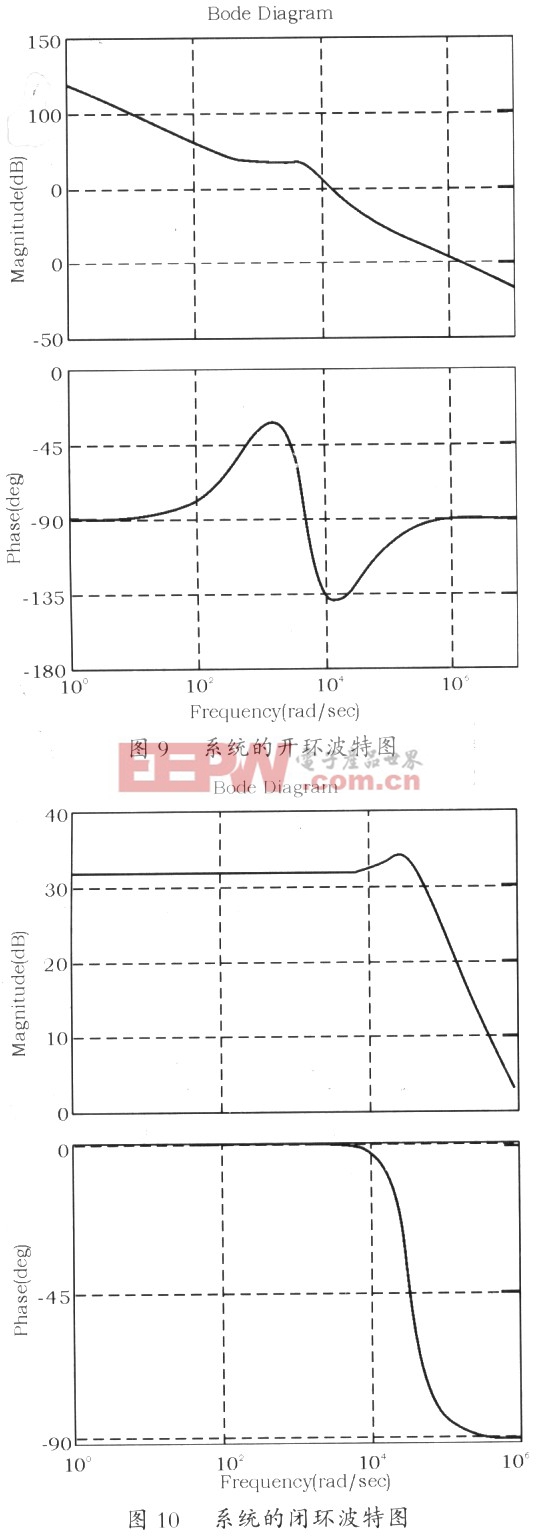
图5~图8是用逆变器验证上面的控制方案的仿真结果。图中的切换都是选在正弦波的波峰处,这种情况代表了切换的最大电压崎变。图中所示波形的动态调整时间小于0.5ms,稳态整流桥负载THD为1%。图9和图10是系统的开环和闭系统的相位裕度大于60℃,为数字控制的滞后,死区效应,滤波器的滞后特性等留有足够的稳定裕量。而且调节时间很快,通带内增益稳定,且相移很小。







评论