基于EKF的异步电机直接转矩控制系统仿真研究

直接转矩控制(DTC)交流调速技术是继矢量控制变频之后发展起来的一种新型的具有高性能的变频调速技术。DTC借助瞬时空间矢量理论在定子静止坐标系下计算电动机的磁链和转矩,通过转矩两点式调节器把转矩检测值与给定值做滞环的比较,把转矩波动限制在一定的容差范围内,其控制效果取决于转矩的实际状况,具有结构简单和动态响应快的优点。
异步电机的状态方程是一组非线性方程,根据系统辨识理论,对非线性系统状态估计的最好方法是扩展卡尔曼滤波。本文以定子电流和转子磁链为状态变量,将角速度作为估算的参数,利用扩展卡尔曼滤波(EKF)方法估算异步电机的角速度和转子磁链,由此建立异步电机无速度直接转矩控制系统。
1 扩展卡尔曼滤波器
卡尔曼滤波是60年代发展起来的一种现代滤波方法,它的一个重要作用在于系统的状态估计。当噪声是正态分布情况时,这种滤波给出了状态的最小方差估计,当不是正态分布情况时,这种滤波给出了状态的线性最小方差估计。卡尔曼滤波算法是一种应用于线性系统中的迭代估计算法,为了能够在非线性的感应电机模型中应用卡尔曼滤波算法,首先需要将非线性系统线性化。通过对非线性函数的Talor展开式进行一阶线性化截断,从而将非线性问题转化为线性问题。
一般非线性系统模型为:
![]()
式中,W(t)和V(t)分别称为系统噪声矩阵和测量噪声矩阵。测量噪声矩阵由测量的不准确性造成,一般W(t)和V(t)都被假设为零均值的高斯白噪声,其方差矩阵分别为Q和R。
对上式的离散随机非线性系统,可以写为

式中,ψ[]为n维向量非线性函数;h[]为m维向量非线性函数。
将离散随机非线性系统状态方程式中的非线性向量函数ψ[]围绕滤波值![]() 展开成泰勒级数,并略去二次以上项,得:
展开成泰勒级数,并略去二次以上项,得: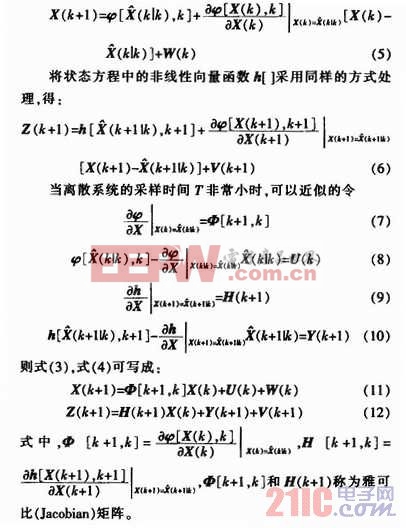
这样,非线性系统的状态估计问题就转化为线性系统的状态估计问题了,按照卡尔曼滤波的推演方法,得到EKF算法步骤如下:

滤波器相关文章:滤波器原理
滤波器相关文章:滤波器原理
电源滤波器相关文章:电源滤波器原理
矢量控制相关文章:矢量控制原理 数字滤波器相关文章:数字滤波器原理





评论