直流电机PWM调速系统中控制电压非线性研究

用示波器分别测出电压的顶端值Utop与底端值Ubase,端电压平均值Uarg满足关系式:
![]()
其中:α为占空比。
正是由于所测得的电机端电压底端值Ubase不为0,所以得出的占空比与端电压平均值之间关系曲线为抛物线。若将电机取下,直接测L298的out1与out2输出电压。所测得的电机端电压底端值Ubase约为0,所得的占空比与端电压平均值满足线性关系,即令式(4)中Ubase为0,式(4)变为:
![]()
3.2.2 原因分析
将电机取下后,直接测L298的输出端之间的电压,占空比与端电压平均值满足关系式(5),说明整个硬件电路的设计以及软件编程的正确性。从电机反电势角度分析,当直流电机旋转时,电枢导体切割气隙磁场,在电枢绕组中产生感应电动势。由于感应电动势方向与电流的方向相反,感应电动势也即反电势。直流电机的等效模型如图5所示。图5(a)表示电机工作在电动机状态。图5(b)表示电机工作在发电机状态。
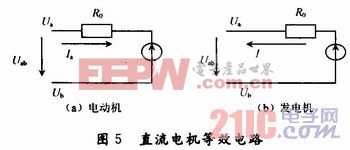
如图5(a)所示,电压平衡方程为:
![]()
式中:U为外加电压;Ia为电枢电流;Ra为电枢绕组电阻;2△Ub为一对电刷接触压降,一般取2△Ub为0.5~2 V;Ea为电枢绕组内的感应电动势。电机空载时,电枢电流可忽略不计,即电流Ia为0。空载时的磁场由主磁极的励磁磁动势单独作用产生。给电机外加12 V的额定电压,由(6)可得反电势:
![]()
以40%的占空比为例,电机端电压Uab是测量中的电压平均值Uarg,其值为8.34 V,测量中的电压底端值Ubase约为7 V。由式(7)可得Ea的值范围应在6.34~7.84 V。由图5(b)可见,此时Uab的值是测得的底端值Ubase即电机的电动势Ea为7 V。
当PWM工作在低电平状态,直流电机不会立刻停止,会继续旋转,电枢绕组切割气隙磁场,电机此时工作在发电机状态,产生感应电动势E。
![]()
式中:Ce为电机电动势常数;φ为每级磁通量。由于电机空载,所以图5(b)中无法形成回路。用单片机仿真软件Proteus可直观的看出在PWM为低电平状态,电机处于减速状态。低电平持续时间越长,电机减速量越大。正是由于在低电平期间,电机处于减速状态,由式(8)可知,Ce,φ均为不变量,转速n的变化引起E的改变。此时Uab的值等于E的值。电机在低电平期间不断的减速,由于PWM周期较短,本文中取
20 ms,电机在低电平期间转速还未减至0,PWM又变为高电平了。这样,就使测得的Ubase值不为0。以40%的占空比为例,当PWM工作在低电平状态,测得Ubase的值约为7 V。由式(8)可知,当正占空比越大,转速也就越大,同时减速时间越短,感应电势E的值越大。所以Ubase的值也就越大。
4 结语
重点分析了直流电机PWM调速过程中控制电压的非线性,对非线性的影响因素做了详细的分析。由于PWM在低电平期间电压的底端值不为0,导致了占空比与电机端电压平均值之间呈抛物线关系。因此,可用得出的抛物线关系式实现精确调速。本系统的非线性研究可为电机控制中非线性的进一步研究提供依据,在实际运用中,可用于移动机器人、飞行模拟机的精确控制。


评论