一种双模糊控制器的设计实现

在总结专家经验和知识的基础上,得到模糊控制规则表如表1所示。控制规则多少决定了控制系统的精度,控制规则的多少也与输入输出变量数目、每一变量的语言值数目等因素有关。本系统共设计了56条规则如表1所示。本文引用地址:https://www.eepw.com.cn/article/162225.htm
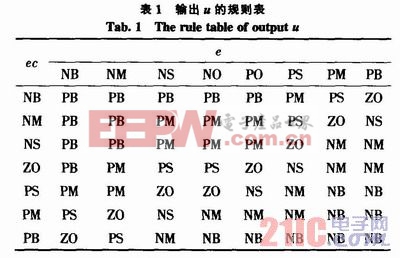
使用的推理方法是最大最小推理法。最终推理结果是以模糊子集的形式来表示系统的输出量阀门的校正量。阀门不能用这样的表示方式进行调节,故需进行模糊量的精确化,本设计中采用了重心法来进行解模糊。
2 仿真过程及结果
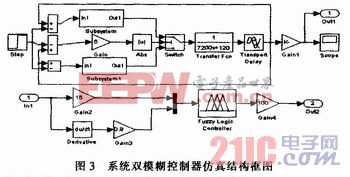
利用MATLAB的SIMULINK进行仿真,建立本系统的双模糊控制器仿真结构图如图3所示。仿真结构图里设计了两个子系统,见图3,两个子系统结构基本一致,只是具体参数选取不同。
利用SCOPE观察实验结果、记录,对比试验结果,其中图4为常规PID控制输出结果,图5为模糊控制器输出结果,图6为双模糊控制器输出结果。
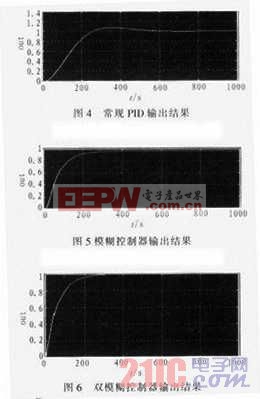
从结果对照图来看,系统响应时间的对比:双模糊控制响应时间最短,模糊控制其次,常规PID控制响应时间最长;常规PID控制到达稳态600 s左右的时间,模糊控制需要400 s到达稳态,而双模糊控制器不到300 s即可到达稳态。
常规PID控制存在明显的超调,模糊控制及双模糊控制则没有超调。模糊控制方法和双模糊控制器方法区别在于,模糊控制器存在2%~5%左右的稳态误差,而双模糊控制器在稳态时消除了稳态误差。
3 结束语
本文设计实现了一种双模糊控制器,利用双模糊控制器完成了对系统的仿真。仿真结果显示,双模糊控制器的上升时间短,响应速度快,稳态精度高。从实验来看,双模糊控制器可以改善系统的控制精度和稳定性能,若将此理论应用于实际工程,无疑具有很好的应用价值。











评论