基于RTX的舵机控制系统研制

3.1 上层软件
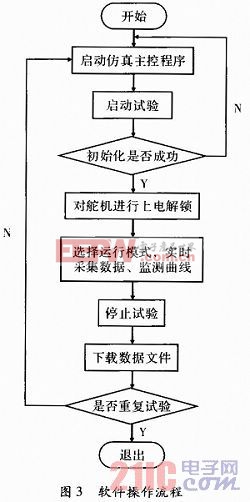
在启动舵机控制程序之前,先要启动RTX实时环境,因为底层驱动程序和上层舵机控制程序是同时运行的。软件的具体操作流程如图3所示。本文引用地址:https://www.eepw.com.cn/article/161110.htm
3.2 底层软件
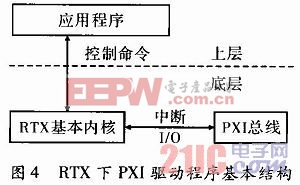
根据舵机控制软件对数据采集的实时性要求,首先要对各采集板卡做在RTX下的驱动开发,这是舵机控制系统解决实时性问题的重点和难点。编写基于RTX的驱动程序,可以通过调用实时应用程序编程接口(RTAPI,Real-Time Applieation Programming Interface)函数来访问实时子系统(RTSS,Real-Time Sub-System),并维持其系统的实时性。这样处理的优点是硬件可以通过RTX函数直接访问,驱动开发也更加简单。
所谓驱动程序,就是直接控制设备进行工作的底层程序,实现了硬件和高层应用程序的交互。如果要使用PXI总线设备上的某个功能,就需要CPU能通过某段范围的地址访问或内存访问的方式与该功能交互。RTX驱动程序可以将获得的基地址转换成系统能够识别的虚拟地址,然后通过读写函数对不同板卡的底层寄存器进行操作,从而实现控制板卡正常工作。PCI定位寄存器配置由BIOS自动完成初始化,如分配总线号、中断向量、地址空间等,驱动程序只需要对数据偏移寄存器,即设备内部寄存器进行配置。访问内部寄存器,首先要获得PCI设备在BIOS上的映射基地址,然后根据设备的寄存器偏移量和格式对寄存器进行访问。








评论