一种基于物联网的远程监控系统设计

2.3.2 配置编译BusyBox
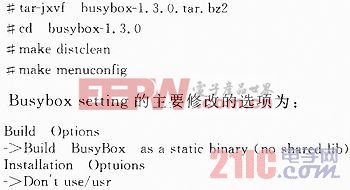
如果这里不选择成静态的二进制文件,那么在以后面做ramdisk时就需要把arm-linux下的一些动态库复制到ramdisk的/lib里面去;不选择Don’t use/usr,make install时busybox就不会安装到本目录的_install下,会覆盖原来的usr/bin中内容。由于Linux是开放源代码(Open Source)的,不存在黑箱技术,遍布全球的众多Linux爱好者又是Linux开发者的强大技术支持,所以其他需要程序的读者按照自己的需要选择下载后编译整合Linux内核和initrd成bootplmage,再下载bootpImage启动Linux就可以了。
2.4 串口设计
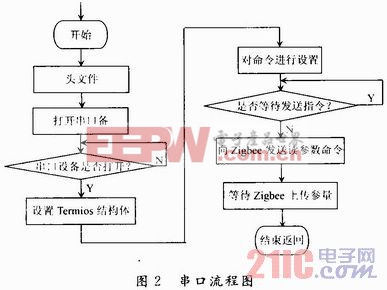
因为Zigbee CC2430为本设计的下位机,因此软件设计主要集中在对ARM中央控制平台的实现和Linux操作系统串口程序的实现上。因为目前Linux2.6x系列内核对串口有很好的支持性,所以在Linux对串口驱动上的实现就很简单,也可极大的简化后期的维护,有利于推广。Li nux串口实现程序主要是对串口包括波特率和停止位设置。串口的设置主要是设置struct termios结构体的各成员值。在Linux下串口文件位于/dev下,一般在内核中串口1为/dev/ttySO,串口二为/dev/ttyS1,打开串口是通过标准的文件打开函数来实现的。当设置好后即可发送初始化的命令和等待接收命令。串口流程如图2所示。本文引用地址:https://www.eepw.com.cn/article/160745.htm
在应用层面的设计中还包括WEB的设计实现,远程监控系统的实现,这里就不一一赘述。
3 结语
本文论述的远程监控系统设计与以往的监控系统不同,不仅采用了高性能的处理器芯片大大提高了系统的性能、还融入了物联网技术。使这种远程监控能够领域更加广泛。并且在设计上充分考虑到了系统的可扩展性和兼容性问题,实现了本系统与其他系统的无缝连接,以满足不同工作环境的需要。











评论