拟人机器人上肢多关节控制参数整定

1.4 电机数学模型的参数确定
从前面的理论分析得到了一个电机的开环控制时域模型,可以将实际测量得到的电机的开环数据代入式(1),求出电机模型中的参数a,b,c。其中a=522 284.126 112 083;b=1 282.297 371 441;c=0.084 348 857;从而得到新的曲线,如图3所示,为便于比较同时绘出了
电机实际响应曲线。
由图3可看出理论计算得到的曲线与电机实际曲线的拟合度非常好,说明采用式(1)作为电机开环函数完全可行。控制参数:a=522 28 4.126 112 083;b=1 282.297 371 441;c=0.084 348 857可以作为电机的仿真参数。因此拟人机器人手部电机开环系统的时域响应函数为:

2 电机PID闭环控制系统仿真
从以上分析可以看出,电机开环系统很容易受到干扰。因此在开环的基础上,考虑构造电机的闭环控制系统。由于PD控制系统存在静差,PI控制系统响应时间长,DI控制系统稳定性不好,鉴于此,下面考虑PID控制,其系统仿真模型如图4所示。
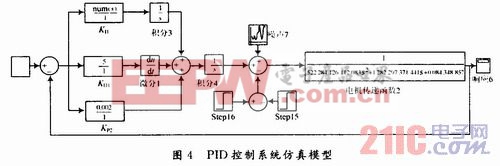
该系统的控制效果基本上令人满意,图5是部分控制效果模拟。
由此可见,PID控制很好地结合了PI、PD控制系统的优点,避免了他们的缺陷,使系统最终获得了很高的控制精度、更快的响应速度、更突出的控制稳定性,因此最终选择PID作为机器人上肢DC电机的闭环控制系统。通过对比可以看出,该系统比较完美,超调量几乎没有,响应时间也很短,抗干扰能力也很强。
3 结语
通过以上建模和仿真,找到了一个合适的控制方法,即PID控制,并且经过调节得到的一组较好的PID控制参数为KP=0.002;KD=5;KI=0.000 000 09。按照以上参数,系统最终获得了很高的控制精度、更快的响应速度、更突出的控制稳定性,几乎能够完全抵抗外部的干扰。该仿真对拟人机器人手部控制节点的设计具有很重要的指导作用,同时该方法具有很强的普遍性,对于一般的直流电机的闭环控制也有一定的借鉴意义。











评论