基于LEA-6R的惯性导航系统设计与实现

校验方法如下:
其中,BUFFER[I]表示CLASS到Payload的所有无符号整型数。
陀螺仪,温度传感器,天线监管器的开启和关闭等外围设备的配置信息,其信息的子集类(Class)为CFG(Configuration input Messag es),如果CFC类对LEA-6R的配置成功,LEA-6R会返回ACK—ACK信号,反之则返回ACK—NAK信号。
例:天线配置UBX—CFG—ANT。
UBX协议说明中可以查到,协议的格式如图6所示。本文引用地址:https://www.eepw.com.cn/article/159771.htm

默认状态下,开启电压控制信号AADET引脚,允许短路检测和自动短路修复,但电路未启动。其中,Sync char1 Sync char2为OXB5和0X62;CLASS为0X06;ID为0X13(天线控制);LENGTH LittleEndian为0X04,0X00(指Payload的长度为4 Byte);Payload为由Bitfiled flags和Bitfiled pins二个字长16位控制位组成。Bitfiled flags是对天线监管器开启等的控制。Bitfiledpins是对AADENT等管脚的控制。控制位对管脚的控制说明,在CFG—ANT格式中可以查到。文中,Bitfiled flags取0XC2,0X10,Bitfiled pins取0X0F,0x64;CK_A,CK_B为16位的校验字段。
发送到LEA-6R中开启天线监测电路的数据为B5 62 06 13 04 00 04 00 0F 64 94 5F。
1.7 UBX协议中数据的读取
UBX协议与NMEA协议的区别是:MNEA协议每秒自动发送一次数据,UBX协议是在收到发送命令的情况下,才发送数据。发送读取数据的命令格式除了Payload为空外,其他与UBX协议的格式相同。例如,读取天线配置状态,发送的数据如图7所示。

系统在收到此命令后,会返回天线配置状态的数据。
2 程序设计
LEA-6R的串口可直接与MCU相连接进行通讯。为及时处理GPS的信息,以及考虑到车载仪器和其他信息需要处理,在对GPS信息的处理上采取了多线程编程。
读线程流程如图8所示。
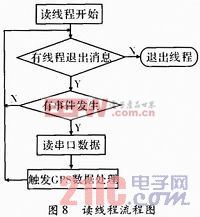
在Windows CE下,使用EVC语言对GPS的配置,数据的读写进行多线程编程。多线程的编程包括线程的创建、启动、运行状态控制、同步及数据通信和线程的正常/非正常退出。程序可分成3部分:(1)打开串口进行参数设置。(2)读写串口数据。(3)数据接收完成后有效数据的提取。
3 结束语
虽然该系统在隧道中长时间得不到信号时定位进度有所下降,但经实际验证,LEA-6R传感器组合惯性导航系统,在一般隧道和城市的高楼间能满足实际应用要求,能使运行中的车辆取得完整的车辆定位数据,对于车辆远程诊断仪有一定的实际意义。







评论