自适应模糊PID控制的太阳光跟踪伺服系统

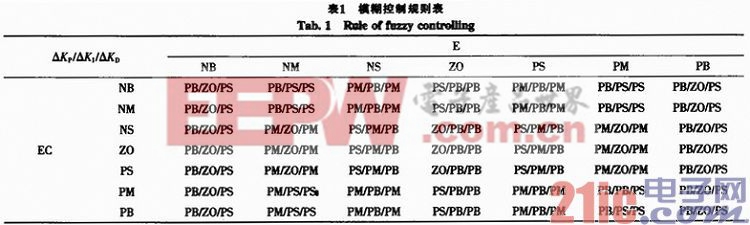
按以上原理并根据PID参数自适应原则和操作经验列出输出变量的模糊控制规则如表1所示。
3.4 模糊量的清晰化
模糊量的清晰化就是把模糊推理后得到的模糊集转化为控制的数字值,这里采用重心法对模糊量进行清晰化。重心法是取隶属度函数曲线与横坐标围成面积的重心作为模糊推理的最终输出值,即:
4 仿真结果分析
文中在Simulink环境中搭建PID控制仿真模型和自适应模糊PID控制仿真模型。其中,KP,KI,KD保持文献中所提供的参数:KP=1.81,KI=0.4,KD=0.158。对仿真模型施加单位阶跃输入信号,仿真时间为5 s。其响应曲线如图5所示,误差变化曲线如图6所示,控制效果如表2所示。
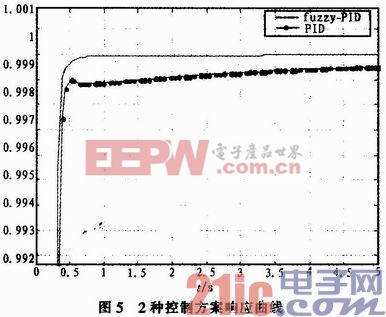
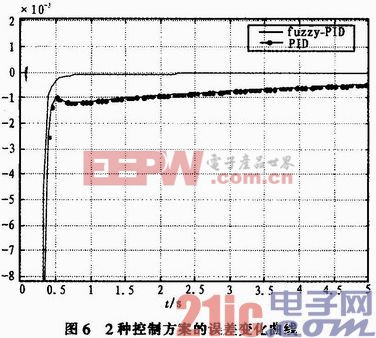

从图5、图6及表2两种控制方法的仿真结果对比来看,自适应模糊PID控制响应速度较传统的PID快。在稳态误差方面,自适应模糊PID控制较传统的PID小。综上所述,太阳能伺服系统中自适应模糊PID控制器具有响应时间短、稳态误差小等特点,系统具有更好的适应性和鲁棒性。
5 结束语
文中采用自适应模糊PID控制器对文献中提出的双轴跟踪伺服系统模型进行控制,通过在Simulink环境中的仿真结果发现,自适应模糊PID控制器较文献中传统的PID控制器具有较强的稳定性、适应性与鲁棒性,这在双轴跟踪伺服系统的控制过程中具有重要实用价值与应用空间。






评论