自适应模糊PID控制的太阳光跟踪伺服系统

2 被控对象模型
目前,关于太阳能伺服系统模型大多是对直流电机建模,并没有考虑到系统参数对跟踪系统的影响。文中采用的被控对象为文献中提出的基于步进电机的双轴跟踪伺服系统,其基本功能是使光伏阵列快速、平稳且准确地跟踪定位太阳光源。利用天文知识可以精确地获得太阳高度角和方位角。太阳光源跟踪伺服系统时刻检测光伏阵列和太阳光源的位置并将其输入到驱动运算单元,并产生输出信号驱动两部电机,分别在水平面和铅锤面内运动,使太阳光时刻垂直入射到光伏阵列的表面上,达到准确和快速跟踪太阳光源的目的。太阳能光源跟踪伺服系统如图2所示。
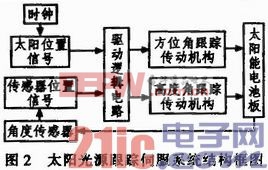
由于高度角跟踪传动机构与方位角传动机构工作时互不影响,下面以方位角跟踪传动机构为例进行建模和仿真研究。由文献可知,方位角跟踪传动机构的传递函数为:![]()
3 自适应模糊PID控制器的设计
该控制系统设计的关键是要先找出3个参数与误差e和误差变化率ec之间的模糊关系,要求在系统运行中不断检测e和ec,根据模糊控制原理对3个参数进行在线修正以满足不同情况下对参数的不同要求,最终获得良好的动态和静态控制性能。
3.1 确定模糊控制器的结构
基于对系统的上述分析,模糊控制器采用两输入、三输出的控制器,将误差e和误差的变化率ec作为输入,将PID控制器的3个参数的修正值作为输出。KP,KI,KD参数调整算式如下:
3.2 确定语言变量并确定语言值的隶属度函数
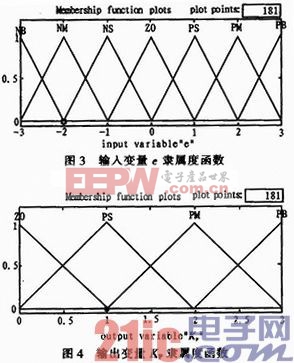
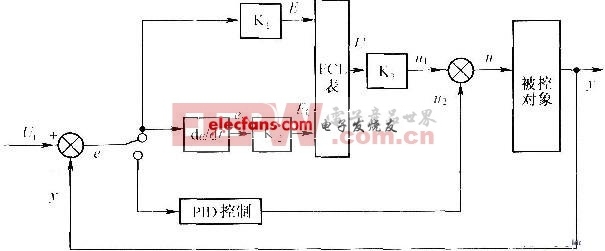
设定输入误差e的语言变量为E,误差变化率ec的语言变量为EC,两者的论域都为{-3,-2,-1,0,1,2,3},相应的语言值为{负大(NB),负中(NM),负小(NS),零(ZO),正小(PS),正中(PM),正大(PB)};输出△KP的语言变量为△KP、△KI的语言变量为△KI、△KD的语言变量为△KD,三者的论域都为{0,1,2,3},相应的语言值为{零(ZO),正小(PS),正中(PM),正大(PB)}。输入输出变量的隶属度函数采用三角函数。输入变量e的隶属函数如图3所示,输出变量△KP的隶属函数如图4所示。
3.3 建立模糊控制规则
PID参数的适应必须考虑到在不同时刻3个参数的作用以及相互之间的互联关系。对于不同的误差e和误差的变化率ec,控制器参数的自整定原则可归纳如下:1)当误差较大时,为使系统具有较好的快速跟踪性能,应取较大的KP和较小的KD参数,同时为避免系统响应出现较大的超调,应对积分作用加以限制,取较小的KI;2)当误差处于中等大小时,为使系统响应具有较小的超调,KP应取小一些,同时为保证系统的响应速度,KI和KD大小要适中;3)当误差较小时,为保证系统具有较好的稳态特性,KP和KI应取得大一些,同时为避免系统在设定值附近出现振荡,并考虑系统的抗干扰性能,当误差变化率较小时,KD可取大些,当误差变化率较大时,KD应取小一些。






评论