冲孔打桩机的自动控制系统设计

3 冲孔打桩机自动控制系统硬件电路设计
根据冲孔打桩机自动控制系统原理图,设计硬件电路,如图3所示。系统的硬件电路设计遵循模块化的设计方法,主要包括控制器模块、电源模块、刹车控制模块、离合控制模块、电机控制模块、人机接口模块及其他保护电路等。
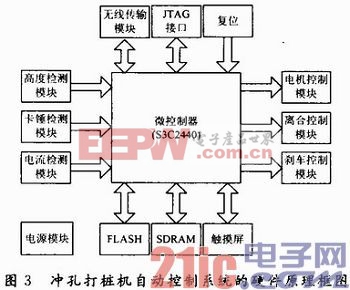
(1)控制器模块。系统的微控制器采用拥有低功耗模式的S3C2440,它是Samsung公司以ARM为架构推出的ARM920T的微处理器核心,拥有16 KB的资料快取和16 KB的指令快取、MCU快取,它有固定的32 b运算码宽度,能降低编码数量所产生的消耗,可以减轻解码和管线化的负担,大多均为一个时间周期执行,有强大的索引定址模式,它精简且快速的2-priori-ty-le Vel中断子系统,具有可切换的暂存器组,它支持ARM处理器16-bit(Thumb)指令模式。工作频率为499 MHz,最高工作频率可达533 MHz。
(2)电源模块。在设计系统中有多种电压,电源电压分为直流1.8 V,3.3 V,5 V,和交流220 V几种。其中1.8 V用于微控制器的内核供电;3.3 V用于微控制器的外设I/O口线供电;5 V用于其他大部分芯片供电;24 V为外围接口电路供电;交流220 V用于AC—DC(220 V转24 V)供电。电源电路主要经过稳压芯片稳压和电容滤波。主要电路如图4和图5所示。
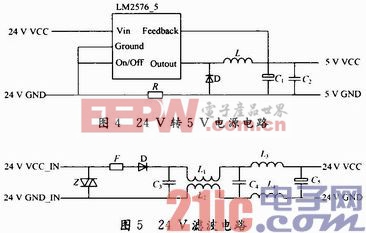
图中R为0 Ω,C1为25 V 100μF的电解电容,C2为104独石电容,C3,C4为CBB电容,C5为50 V470μF的电解电容,Z为防雷管,F为保险,L1和L2组成共模扼流圈,L3,L4为差模电感。
(3)刹车控制系统模块。刹车、离合电机的控制归根到底都是对电机的控制,由于需要控制电机的通断,所以控制也只需要简单的继电器控制,故采用普通I/O口和功率晶体管即可,如图6所示,F为保险,Z为防雷管,Q为晶体管BCP56。

(4)离合控制系统模块。离合控制的设计方案和刹车控制的设计方案相似。
(5)卡锤检测模块。在打桩机工作过程中,要实时采集打桩机的高度和速度信号,以便对桩机进行控制。本设计中采用霍尔传感器对高度进行测量,在打桩机运行过程中,工作环境复杂多变,有时会造成卡锤和吸锤等故障,此时及时检测此类信号,并反馈给微控制器,以便及时调整控制策略,提高打桩机的工作效率。
(6)电机保护电路的设计。系统采用45 kW的三相异步电机,它是提锤升降的动力来源。电机保护电路的设计对于整个系统来说非常重要。电机保护电路的设计主要包括2个方面:
一是电机的过流保护,电机在起锤和突然启动时会产生大的电流,在本设计系统中,采用电流互感器来检测起锤的电流信号,以及实现对电机的过电流保护;
二是电机的继电保护,采用继电器来控制电机的电源开关,以便在紧急情况下对电机和整个系统进行保护。

互感器相关文章:互感器原理
霍尔传感器相关文章:霍尔传感器工作原理
霍尔传感器相关文章:霍尔传感器原理 三相异步电动机相关文章:三相异步电动机原理









评论