冲孔打桩机的自动控制系统设计

摘要:为了提高建筑施工的工作效率,节约生产成本,从冲孔打桩机的工作原理出发,采用低功耗的S3C2440作为微控制器,利用直流电机作为执行机构,设计了一种冲孔打桩机自动控制系统。在整个系统的实现上,从机械改装设计、硬件原理以及软件实现等方面对系统进行设计,最终实现冲孔桩机自动打桩的功能。
关键词:冲孔打桩机;S3C2440;直流电机;自动控制
0 引言
冲孔打桩机主要由桩锤、支架、卷扬机以及其他辅助设备组成,其工作原理是利用冲孔打桩机的卷扬机构,将电动机输出动力的回转运动转变为往复运动,通过钢丝绳来带动桩锤的提升,并在一定高度时使桩锤自由下落,利用桩锤的冲击作用冲挤土层或破碎岩石,同时钻渣随泥浆(或用取渣桶)排出,最后在地基土中形成桩孔。施工人员在桩孔内放置钢筋笼,灌注混凝土而制成桩。
目前,冲孔打桩机的打桩作业均由人工手动机械式操纵来完成。操作人员在工作过程中需要频繁对离合装置、刹车装置等控制部件进行操纵,劳动强度很大。随着微电子技术和自动控制理论的发展,将自动控制技术应用于冲孔打桩机,实现打桩的全自动化或半自动化,使操作人员从繁琐重复的体力劳动中解放出来成为可能。
本文通过对冲孔打桩机原有手动控制系统的机械改装,并利用微控制器以及其他辅助元器件设计了一种冲孔打桩机自动控制系统。
1 冲孔打桩机控制系统的机械设计
1.1 离合和刹车控制系统的机械设计
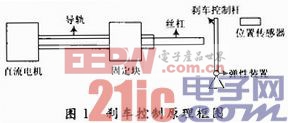
冲孔打桩机原有手动控制系统的执行机构主要包括离合操纵杆和刹车操纵杆。离合操纵杆闭合(简称“紧离合”),桩锤将会被提升;刹车操纵杆闭合(简称“紧刹车”),桩锤将会停止运动。在打桩机工作过程中,要避免离合操纵杆和刹车操纵杆同时闭合。该系统的执行装置可采用气动方式、液压方式和电机控制三种方式,为了方便起见,选择采用电机控制方式。
电机选用直流电机,直流电机响应速度快,力矩大,并且体积小。改装时,将固定块和电机导轨固定在打桩机的底座上,电机旋转带动丝杠沿导轨运行。在原有人工作业方式下运行时,即手动模式下,控制杆收到远离刹车杆的位置,不影响人员操作。采用直流电机作为执行机构对刹车离合控制杆进行控制,微处理器根据位置传感器传回来的位置信息,对直流电机进行旋转控制,电机转动丝杠,带动控制杆运动,从而实现刹车与离合的自动控制。
1.2 传感器的安装
冲孔打桩机原有桩锤提升的高度需要操作人员目测,在自动打桩控制系统中,使用2个霍尔器件为高度传感器,一个检测钢丝绳长度,另一个检测系统是否出现因卡锤故障引起的桩架提升。在卷扬机卷轴上按照一定的间隔,安装该设计系统用到的若干个磁铁,在桩架上靠近卷轴的位置处,安装检测钢丝绳长度的霍尔传感器;在桩架上安装检测卡锤故障的霍尔传感器。
1.3 电机保护器件的安装
设计系统的卷扬机采用45 kW的三相异步电机,在电机的三相电中,使用其中两相对电机进行过流保护和继电保护,一相安装电流互感器,对电机的电流进行检测;另一相安装控制电机开关的继电器对电机的通断进行控制。
2 冲孔打桩机自动控制系统整体设计方案与技术指标
2.1 系统整体设计方案
本文设计的原理框图如图2所示。

冲孔打桩机自动控制系统工作时,施工人员首先对系统进行参数设定,微控制器根据设定的信息控制直流电机的运动,从而带动离合和刹车控制杆达到控制离合和刹车的目的。为了保证刹车和离合控制杆的精确运动,使用位置传感器对控制杆运动的位置进行反馈监控。同时,为了方便操作人员的监控,微控制器将打桩作业的相关参数通过液晶屏显示出来。
2.2 系统的技术指标
(1)提升高度:0.30~3.5m;
(2)提升精度:0.02 m;
(3)刹车时间、离合时间精度:0.01s。

互感器相关文章:互感器原理
霍尔传感器相关文章:霍尔传感器工作原理
霍尔传感器相关文章:霍尔传感器原理 三相异步电动机相关文章:三相异步电动机原理









评论