CAN总线在分布式变电所自动化系统中应用

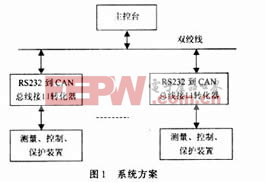
该方案考虑了原有的测量、控制和保护等装置,软硬件上不作改动,只是在原装置与网络之间增加一个RS232和CAN总线的转换器,考虑到变电所网络信息的吞吐量不大,该转换器以51单片机为核心,利用单片机的RS232接口与微机测量、微机控制和微机保护进行通信,在51单片机上扩展一个CAN总线接口,所需的+5 V电源也从测量、控制和保护装置中获得(51的RS232接口芯片采用单一+5 V电源的那种)。此外,主控台以工业控制机为核心,同时担负变电所内部通信管理任务和与远方调度中心的通信任务,在工业控制机中直接选用一块CAN总线插卡就可以了。
本文引用地址:https://www.eepw.com.cn/article/157801.htm该方案的优点是开发周期短,无需对原有测量、控制和保护装置进行大的改动。值得注意的是,CAN总线对网络节点数是有限制的。另外,在选择通信速率时,也要考虑通信距离的限制,在实际应用中,根据系统通信流量的评估和变电所实际情况,选择通信速率为50 kb/s,对应的通信距离限制为1.3 km。
4 CAN总线应用中编程注意事项
CAN总线协议根据接口芯片不同可以有版本2.0A和2.0B两种,两者差别不大,对于应用者来说,更重要的是如何收发信息。
在变电所自动化系统中,有些信息的字节数可以比较短(如开关变位信号的传送),在8 B内,这种报文可以一次发送完毕。而有些信息的字节数较长(如测量数据),无法把一帧报文一次发送完毕,因此,在发送软件模块中需要进行把报文分成几段,每次发送一段。同样地,在接收时,需要进行判别,如果是在8 B长度内的报文,则无需另外处理,如果报文内容的字节数超过8 B,就对所接收的信息进行报文恢复处理。为了对报文进行恢复,在进行报文帧打包时,在报文中加入报文长度内容。只有完全接收完毕的报文才送入报文解析处理环节中。
在应用中应该注意的另外一个问题是,CAN总线控制器在实际运行中,存在着进入总线脱离状态的可能,在应用软件中应加入访问总线状态的模块,如果发现控制器处于总线脱离状态,要及时对总线控制器进行复归操作。
5 结语
本文所提以CAN总线网络为核心的变电所自动化系统已经通过调试后投入实际运行,网络通信速率采用50 kb/s,运行情况良好,控制响应快、状态变位上传迅速,整个系统运行情况完全达到设计要求。











评论