连续超声波位置跟踪器的设计原理及其在虚拟现实系统中的应用实现


图4 数字鉴相器的工作波形图 至于该测距系统的电路设计、实验结果和性能分析请参考文献[7].
四、实验结果与分析 |

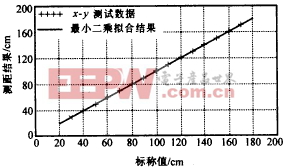
图6 测距结果与标称距离的比较 实验中使用发散角α=60°的换能器,测距单元的距离测量范围为30cm 表1 沿Cξ轴移动时跟踪器的基准标称坐标与测量坐标 |
| 次 数 | 基准标称坐标(cm) | 测量坐标(cm) | ||||
| ξ | η | ζ | ξ | η | ζ | |
| 1 | -20 | 10 | 120 | -20.77 | 10.59 | 121.08 |
| 2 | -15 | 10 | 120 | -15.75 | 10.53 | 120.98 |
| 3 | -10 | 10 | 120 | -10.56 | 9.97 | 119.94 |
| 4 | -5 | 10 | 120 | -4.1 | 10.16 | 120.69 |
| 5 | 0 | 10 | 120 | 1.07 | 10.68 | 120.87 |
| 6 | 5 | 10 | 120 | 5.34 | 10.47 | 120.52 |
| 7 | 10 | 10 | 120 | 10.53 | 11.08 | 119.91 |
| 8 | 15 | 10 | 120 | 14.36 | 10.05 | 120.15 |
| 9 | 20 | 10 | 120 | 20.04 | 9.87 | 120.91 |










评论