CAN总线在多机通信中的应用

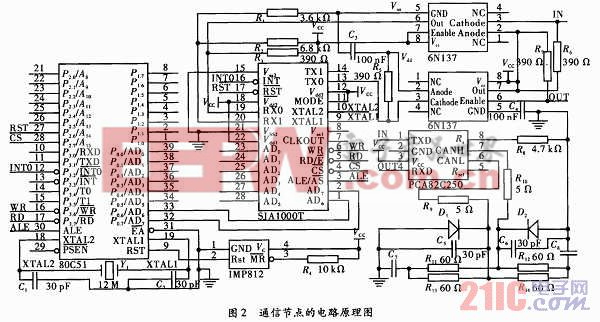
(6)设计仅用到TX0和RX0引脚,根据SJA1000T通信协议所要求的输入/输出逻辑电平关系,SJA1000T的TX1脚悬空,RX1引脚的电位必须维持在0.5 Vcc以上,所以在TX1引脚接上约6.8 kΩ和3.6 kΩ分压电阻。
(7)微处理器C51的引脚P2.7接CAN控制器SJA1000T的片选信号/CS,可知CAN控制器SJA1000T的寄存器首地址为8000H。处理器C41和CAN控制器SJA1000T共用12 MHz的晶振,以提高通信速率。
通过上述分析,设计的电路原理图,如图2所示。本文引用地址:https://www.eepw.com.cn/article/156563.htm
3 系统通信模块的软件设计
通信模块的软件由3部分组成:初始化程序,发送程序和接受程序。仅这3部分程序,就能完成通信节点间信息的传递。要将CAN总线应用于更复杂的通信系统中,还要考虑CAN总线的错误处理,超载处理等功能和节点间的计算方法。由于每个通信节点都有自己的MCU,所以它们之间可以自由通信。通过CAN收发器PCA82C250的引脚CANH和CANL对总线输出,使总线表现“显性”,这时可发送信息。判断总线表现为“显性”时,就要为接受信息做好准备。
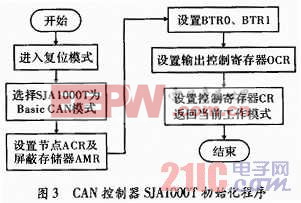
3.1 CAN控制器SJA1000T初始化程序
该程序首先进入复位状态,设置SJAl000T的模式寄存器MR为Basic CAN模式,验收码寄存器ACR和屏蔽码寄存器AMR,再设置定时器0和定时器1,输出控制寄存器OCR,重新设置控制寄存器CR,返回到正常工作模式下。初始化程序流程图如图3所示。











评论