光电通信吊舱内框架悬置系统设计与分析

内框架悬置系统的相关参数可以通过相应的测试和计算获得。表1为内框架系统的质量及转动惯量参数,由试验测得。表2为悬置点相对质心位置坐标,通过数模读取。表3为隔振器主轴刚度,由试验测定。本文引用地址:https://www.eepw.com.cn/article/156373.htm
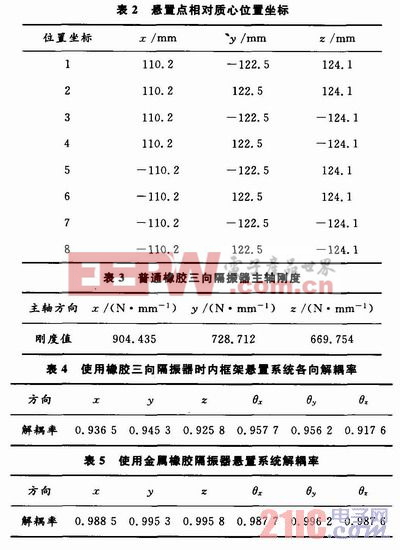
根据前述理论和方法,用Matlab语言编写出悬置系统固有特性和解耦率的计算程序,再将测试和计算所得的悬置系统参数输入程序,即可获得内框架悬置系统的各向解耦率。表4为使用橡胶三向隔振器解耦率数据;表5为使用金属橡胶隔振器的解耦率数据。
表4数据显示,所采用的八点对称布置隔振器的悬置方式在各个方向上的解耦率都很高,基本实现了解耦。由表5可知,使用金属橡胶隔振器后,悬置系统的解耦率进一步得到提高,显示了其“无角位移”功能,但是仍然没有达到100%,其主要原因在于隔振器结构的滑移副接触面间存在微小的间隙,导致了微小的转动,这主要受到加工工艺水平的限制。
5 结语
从子系统综合理论出发,设计了光电吊舱二级隔振模型,对二轴四框架光电吊舱内框架悬置系统进行了分析与设计,对振动耦合情况进行了理论分析和解耦设计,选择八点对称的空间支撑系统,设计一种金属橡胶隔振器,通过限制振动系统的自由度,使悬置系统“强制”解耦,实现了“无角位移”隔振。利用Matlab编程计算验证了这种悬置方式的合理性与正确性。下一步将考虑斜支撑的悬置型式研究。本文的研究结果为光电吊舱悬置结构设计方面的研究提供了理论基础。








评论