CAN总线网络的实时性研究和改进

4 仿真实验及结果分析
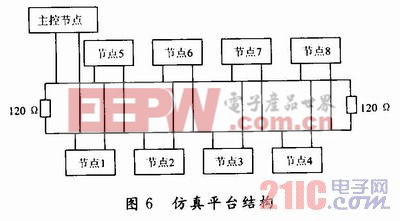
为了验证动态优先级算法和TTCAN算法在提高CAN总线实时性方面的性能,设计了如图6所示的实验平台。分析网络延时时间,并进行两种算法的性能分析。仿真系统设计8个节点,每个节点由AT89S52单片机、SJA1000和PCA82C250组成,通过向每个节点发送消息型和时间型消息,在改变网络负载率的情况下,分别在标准CAN,TTCAN、动态优先级算法3种调度算法下进行实验,比较节点的延迟时间。本文引用地址:https://www.eepw.com.cn/article/155170.htm
向各个节点发送消息型和事件型信息帧各200帧,得到各帧的延迟时间,以其中一个节点为例,统计结果如表2所示。
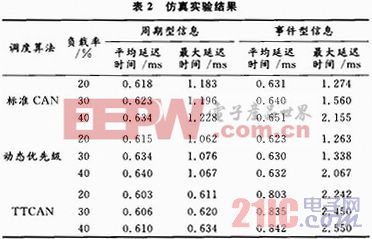
通过实验数据可以看出,随着负载率的升高,动态优先级下周期型消息的延时时间也随之增加,TTCAN下周期型消息的延迟时间很稳定;随着负载率的升高,动态优先级下事件型消息的延迟时间增加较小,TTCAN下事件型消息的延迟时间明显增加。动态优先级调度算法相对于标准CAN调度算法,在网络实时性方面有了一定的提高,随着网络负载率的增加,低优先级节点获得总线使用权的几率增加。TTCAN调度算法能明显降低周期型信息的延迟时间。
5 结语
本文通过分析CAN协议、分析CAN总裁机制,提出了动态优先级调度算法和TTCAN调度算法。通过搭建仿真平台,比较数据帧在标准CAN、动态优先级调度算法、TTCAN调度算法3种算法下的传输延迟时间得出如下结论:相同负载率下,TTCAN调度算法下周期型消息的传输延迟时间要比动态优先级调度算法下周期型消息的延迟时间小;相同负载率下,动态优先级调度算法下事件型消息的传输延迟时间要比TTCAN调度算法下事件型消息的传输延迟时间小。TTCAN调度算法适合于确定性硬实时系统的消息调度;动态优先级算法可以灵活适应系统的变化,提高CAN网络实时性的要求,减小优先级较低站点的数据传输延迟。








评论