基于STM32F103VCT6的微位移控制系统设计

本文引用地址:https://www.eepw.com.cn/article/154786.htm
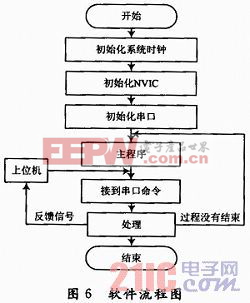
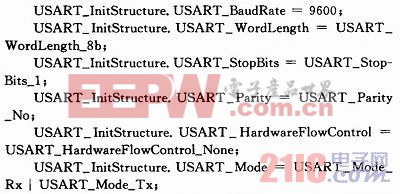
2.3 串口通信协议的编写
上位机与下位机通信采用串口通信,波特率为9 600 b/s、8位数据、一个停止位、无校验、无流量控制、接收发使能。
上位机与下位机之间的控制命令采用9个字节每帧,包括电机选择、命令、数据、校验等。
3 实验
在微位移系统测量实验过程中,采用步进电机步进角为1.8°;步进电机驱动器为8细分;定位机构滚珠丝杠导程为4 mm;光栅传感器分辨率为1μm。理论上每发一个脉冲丝杠移动2.5μm。发送为20 000个脉冲,脉冲频率2 000 Hz。理论上光栅传感器产生50 000个脉冲。控制系统对反馈信号进行计数,并发送偏差命令进行实时修正直到最后达到预定位置。同时也进行了速度调节实验,步进电机运行平稳,验证了系统的可靠性。
4 结论
基于STM32F103VCT6单片机的微位移控制系统实现了对上位机命令的响应、处理及数据交互。通过接收上位机发送的各种命令,STM32F 103VCT6单片机控制系统产生相应的控制信号,并通过步进电机带动滚珠丝杠完成规定的动作。同时通过处理位置反馈信号来判断运动是否到位,使三维微位移系统的运动精度大大提高。而且步进电机采用升、降速控制,避免了步进电机的直接启动与急停,大大地改善了步进电机运动的平稳性,而且输出脉冲频率可以在20 kHz以内调节,具有很宽的速度范围,具有很强的适应性。整体上满足了微位移控制系统的要求。













评论