基于LabVIEW的倒车自动刹车系统开发

3.3.3 速度控制器设计
速度控制器采用离散型的增量PI算法。经整理后如(3)式所示。
式中KP=K*T/Ti,KI=K,K为增益系数,Ti为积分时间,T为足够小的常量本系统选取系统程序运行周期时间即50ms。
由于车辆影响系统动能因素较多,故在增量式PI算法的基础上结合Fuzzy算法。(3)式经Z变换整理后如(4)式所示:
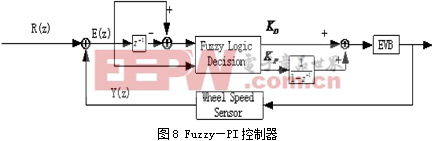
根据(4)式构建的Fuzzy—PI控制器如图8所示:
在Fuzzy算法中,本系统利用实时车速与预定车速轨迹的误差量定义相关特征变量的归属函数,即实时速度归属函数(图9)、速度误差量归属函数(图10)及速度积分误差量归属函数(图11)。上述三个归属函数均采用三角形分布的归属函数,由于试验车是自动档车型,怠速下的速度最大值在5Km/h左右,而本系统是将车速控制在3Km/h以下,故速度归属函数介于0-3Km/h。一般而言,考虑微控制器的运算速度情况下,所设计的语意法则不超过9个,结合本系统轮速传感器的有效精度是0.01Km/h,故在上述三个归属函数均采用了5个模糊语言变量。
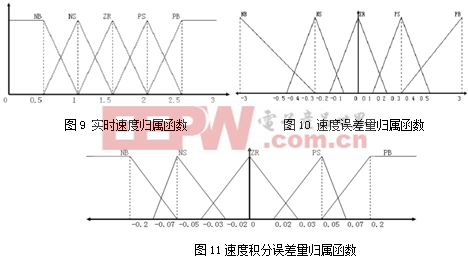
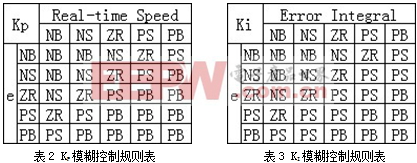
相关归属函数的定义原则是当速度误差较大时调整为较大参数,使得速度可以快速的收敛到预定轨迹,反之若误差量较小时调整为较小参数,使得速度可以稳定在预定轨迹附近。速度积分误差量的归属函数定义则是为了解决系统的稳态误差,即减小实时车速与预定轨迹车速间的误差。KP及KI的模糊控制表如表2、3所示。
经多次测试后得到的特征变量参数如(5)及(6)式所示。最后在解模糊化时,本系统采用最大隶属度去最大值法。
KP={18/NB,10/NS,5/ZR,10/PS,20/PB} (5)
KI={20/NB,10/NS,8/ZR,10/PS,15/PB} (6)
四. 软件实现与现场结果
4.1 系统结构
基于LabVIEW的倒车自动刹车系统主要分为两个部分:
4.1.1 数据采集(下位机部分)
依据前文所述的系统模块可将数据采集分为两个部分。在测距模块中,驱动NI 9264模拟输出产生周期为30ms的40kHz超声波激励信号,通过NI9205接收反射波信号,并利用Labview的脉冲探测函数计算超声波的传播时间,从而计算出车—障碍物的实时距离。在刹车控制模块中,利用NI 8473与车载CAN网络无缝连接,实现DPC与车载设备的数据交互。
加速度计相关文章:加速度计原理













评论