基于MATLAB的控制系统实时仿真平台设计
——

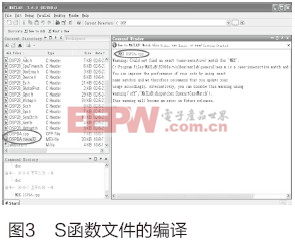
(1)分析模型和对模型描述文件进行编译
RTW分析用户的Simulink图形模块.mdl,计算模块参数,递推采样时间、确定模型各模块的执行次数等信息,并把模型编译成以model.rtw为文件名的中间描述文件。
(2)目标语言编译器(Target Language Compiler)将模型描述文件.rtw转换为指定目标代码的解释性编程语言。
(3)生成自定义联编文件(makefile)
针对不同的目标环境,根据系统模板联编文件(Template Makefile)生成自定义联编文件model.mk。
(4)生成可执行程序
RTW将调用联编实用程序make unity,对生成的联编文件.mk,进行编译、链接,转化为可以在目标环境中运行的.exe文件。


pid控制相关文章:pid控制原理
c++相关文章:c++教程
pid控制器相关文章:pid控制器原理
汽车防盗机相关文章:汽车防盗机原理









评论