使用LabVIEW 等硬件对欧超大望远镜的主反射镜位置调整执行器进行控制

望远镜模拟器
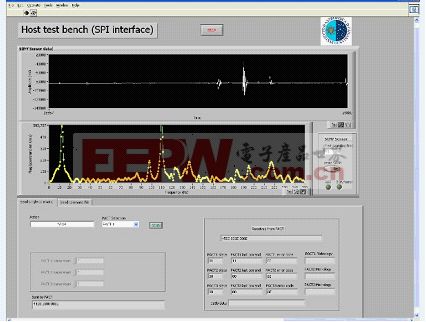
本文引用地址:https://www.eepw.com.cn/article/120350.htm为根据要求对位置执行器进行测试,我们开发了另外一个软件,用来模拟望远镜计算机(通过SPI接口与位置执行器通信)。这一计算机扮演着SPI主控器的角色,而执行器则位于SPI从属端。此模拟程序以1 kHz的速率发送数百万个的位置命令,并以1KHz的速率通过SPI总线读取从属端的反应。此外,它还以5kHz的速率从一个安装于机械测试台上的附加外部位置传感器读取数据,用于对位置执行器的内部传感器进行交叉检查。这三个循环都需要以优于200us的精度进行同步,对数据进行二进制格式的存储以用于离线分析。在长为一小时的测试中,所存储的文件将大于100 MB。图2中的图形用户界面显示了命令管理、以及附加外部位置传感器数据的时域和频域同步显示。
我们所采用的解决方案使用一个带有数字I/O的NI PCI -7811R FPGA卡,安装在基于Windows XP的电脑上(如图2所示)。
兼具实时性和灵活性
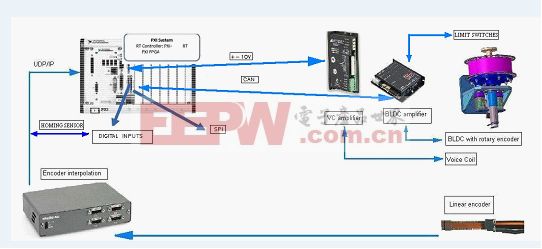
执行器的电子控制装置和软件包含多种接口(如图3所示),而且其中大部分接口都可以在开发的初始阶段进行更改,包括:
带有4MHz时钟的SPI接口,能够每ms接受一个外部命令
CAN总线接口,对粗调电机进行控制,并使用CANopen作为应用层协议,提供诸如行程限位和硬件报警等信息
模拟输出接口,控制微调音圈电机
模拟输入接口,监视微调音圈电机的当前状态
基于以太网的UDP/IP协议接口,读取外部位置传感器的电子装置中的数据
基于以太网的TCP/IP协议接口,下载并调试辅助的离线数据
数字输入接口,用于读取原点位置传感器的数据
使用这些接口需要极大的灵活性。
如下功能则需要实时特性:
使用SPI从属设备以80MHz的速率读取数字输入,在几微秒的时间内对一个新的外部命令作出响应
执行快速微调伺服控制,包括基于若干个2kHz到10kHz滤波器的PID(比例微分积分 - proportional integral derivative)控制,并且在开发的最后阶段可调
同步并存储二进制数据文件,用于SPI外部命令(1kHz)、音圈电机当前模拟输入(2kHz)、基于以太网的位置传感器数据采集(2–10 kHz)和伺服控制器内部变量(2–10 kHz)等数据的离线分析
使用商业现成可用的(commercial off-the-shelf,COTS)的平台满足这些要求,需要在灵活性和实时性之间作出折衷。然而,通过使用NI硬件,并通过LabVIEW Real-Time 和 LabVIEW FPGA模块进行编程,我们所获得的实时特性超出了上述要求,而且各种接口均可调整,无需牺牲灵活性(图3)。
结论
NI PXI平台帮助我们在保持系统灵活性和实时性的同时显著减少了开发时间,而且能够满足电子装置/软件方面的设计要求。使用LabVIEW,可以在同一个软件环境中对实时控制器和FPGA模块进行编程,帮助我们快速集成系统,并确保系统独立、可靠。此外。此外,NI工程师为我们提供了快速且有效的帮助,让我们更快完成开发。











评论