利用无传感器矢量控制技术实现超高效率电机控制

只看内置式 PMSM (IPMSM)的标准电压公式,坐标系可以表示为:
本文引用地址:https://www.eepw.com.cn/article/111226.htm
其中 θerr 为实际角度与估计角度之间的差值。
现在重新定位 d 轴,可以得到:

假定电流 PI 调整器将产生小误差, θerr 很小,d 轴可以表示为:
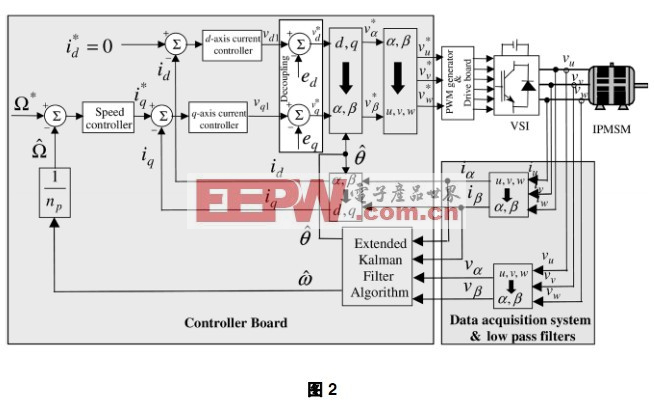
在图 1 的建议估计器及所导出的公式中,误差信号 Vds_error由 PI 补偿器处理,以导出转子的转速,而转子的角度则通过对估计的速度进行积分而算得。其它常见方法用微分法计算速度,但这会使系统易受噪声影响。Bon-Ho Bae 的实验研究表明,建议估计器能够为应用提供非常准确且可靠的速度信息。但在零速和低速时,反电动势电压不够高,无法用于所建议的矢量控制。因此,对于从零速度开始的无缝操作,估计器利用恒定的幅度和预设的频率来控制电流。这里,同步坐标系的角度通过对频率进行积分而导出(初始启动方法)。
EKF 技术
我们现在看另一个利用 EKF 技术原理的例子(来源于 Mohamed Boussak),并且同样与初始启动相结合:
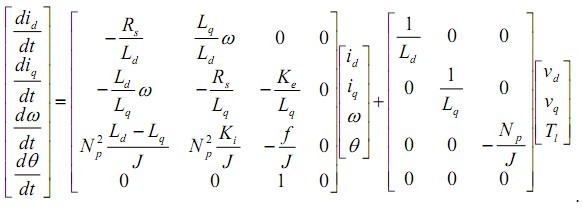
从 PMSM的基本公式开始,将其重写为四阶动态模型:
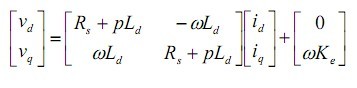
其中:
![]()
PMSM所产生的扭矩为:
![]()
动态模型基于一些简单的假设,忽略正弦反电动势和涡电流,于是可以得到:












评论