一种改进型太阳阵最大功率点跟踪方法

这样,最大功率点的跟踪就可以转化为DC/DC电路占空比的控制问题,通过占空比的调制,使得星上载荷获得最大功率。由于星上某一时刻实际工作载荷阻抗的不确定性,DC/DC电路必须具备双向性调节(既可以增大等效输入阻抗,亦可以减小等效输入阻抗)。虽然相关文献中,DC/DC电路有采用降压斩波电路和升压斩波电路,但是根据上述分析可知,这两种电路有其自身的局限性的(当R>Rs,降压斩波电路将无法匹配整星阻抗,使得Req=Rs,以期太阳阵输出功率最大;升压斩波电路类似)。所以鉴于星上某一时刻实际工作载荷的不确定性,DC/DC电路应选择采用反激电路、升降压电路或Cuk电路为佳。
本文引用地址:https://www.eepw.com.cn/article/108621.htmMPPT理论的实现
目前最大功率点控制方法很多,常用的有恒压跟踪法(CVT)、扰动观察法以及增量电导法(INC)。恒压跟踪法是一种建立在外界温度恒定前提下近似最大功率跟踪方法,鉴于此种控制方法的局限性,不适合用于星上太阳阵控制;增量电导法是利用太阳阵输出端动态电导值dI/dV,与此时静态电导的负数-I/V相比较,控制太阳阵输出电压方向的一种最大功率点控制法。当传感器精度有限时,满足dI/dV=-I/V的概率有限,将不可避免产生误差。
扰动观察法具有控制方式简单的优点。常规扰动观察法是通过计算机周期性地采集太阳阵输出电压和电流,计算出输出功率,并和上一次输出功率进行比较,根据比较结果控制DC/DC电路。经过反复比较、控制,最终使得太阳阵工作在最大功率点附近。太阳阵在最大功率点振荡的幅度取决于系统的采样周期和执行时间。过大的采样周期虽然可以提高跟踪速度,但跟踪过程中有可能会跨越最大功率点,最终会在最大功率点处振荡,造成平均输出功率大大低于最大功率,甚至无法跟踪到最大功率点。过小的采样周期,会对硬件电路提出更高的要求,不利于元器件的选取和增加系统的研制成本,而且,从系统的动态响应性角度考虑,如果某一时刻太阳阵的实际功率点偏离最大功率点过远,过小的采样周期将需要花费更多的时间才能跟踪到位。所以常规扰动观察法首先面临着跟踪步长选取难的问题。
此外,当外部环境快速变化时,常规扰动观察法不能快速跟踪,很容易造成误判现象。例如,当太阳阵已经工作在最大功率附近,假设此时对应的占空比为Da,对应输出功率为Pa(图2),当占空比扰动方向向右移动时,若日照强度没有发生变化,则太阳阵输出功率Pb>Pa,占空比扰动方向正确。但倘若光照强度突然降低时,则对应Vb的输出功率Pb`

所以,根据现有理论和上述常规扰动观察法存在的缺点,本文提出一种鉴于三点比较理论的变步长控制方法,通过对DC/DC占空比的控制,实现对太阳阵最大功率点的快速跟踪、定位。
首先在太阳阵的P-D曲线不同位置,从左向右任意取三点a、b、c,对应的输出功率和占空比分别为Pa、Pb、Pc和Da、Db、Dc(图3)。先引入一个符号变量S,对于a、b两点,若Pa≥Pb,则S=-1,否则S=1;对于b、c两点,若Pc≥Pb,则S=1,否则S=-1。这样,以b点占空比Db为基准,Da=Db-l,Dc=Db+l。每一个采样周期里,比较三点计算所得功率的大小,进而得到符号变量S的值,根据S决定占空比移动方向。
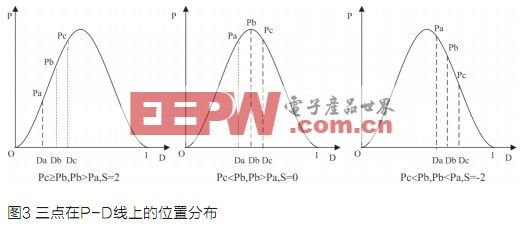
由图3可知,当S=0时,工作点将不移动;当S=2时,工作点将向右移动;当S=-2时,工作点将向左移动。现在回顾上面所提及的常规扰动观察法中,太阳阵误判情形:Pb≤Pa,Pb≤Pc,此情形下S=0,工作点将保持不变,这样就可以有效地避免光照快速变化时所引起的误判现象。






评论