两轮自平衡代步小车集姿态信息感知、电机驱动、动态平衡控制于一体,设计难点在于姿态信息准确感知与自平衡控制。姿态信息感知通过带有自适应降阶卡尔曼滤波器的陀螺仪、加速度计集成传感器来实现。针对传统PID、LQR、人工神经网络等自平衡控制方式的缺陷与不足,提出采用模糊PID控制。利用陀螺仪、加速度计、ARM微处理器、语音播报、LoRa通信等技术,设计出基于模糊PID的两轮自平衡代步小车。详细阐述了系统工作原理、系统架构、硬件设计及相关程序设计。实践表明,基于模糊PID的两轮自平衡代步小车具有平衡稳定、续航距离远
关键字:
202302 两轮自平衡 模糊PID 陀螺仪 加速度计 ARM LoRa 卡尔曼滤波 姿态信息
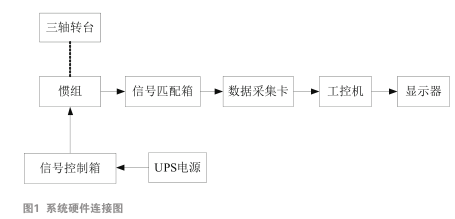
Design and implementation of high-speed data acquisition system for inertial measurement unit based on PCI express bus宋仔标,崔洪亮,高倩,刘宁(火箭军士官学校,山东 青州 262500) 摘要:惯组数据的采集是进行惯组标定及导航姿态解算的基础,其数据采集精度对惯组的标定和导航精度有重要的影响。提出了一套基于PCI-E
关键字:
201904 PCI-E总线 惯性测量组合 数据采集 卡尔曼滤波
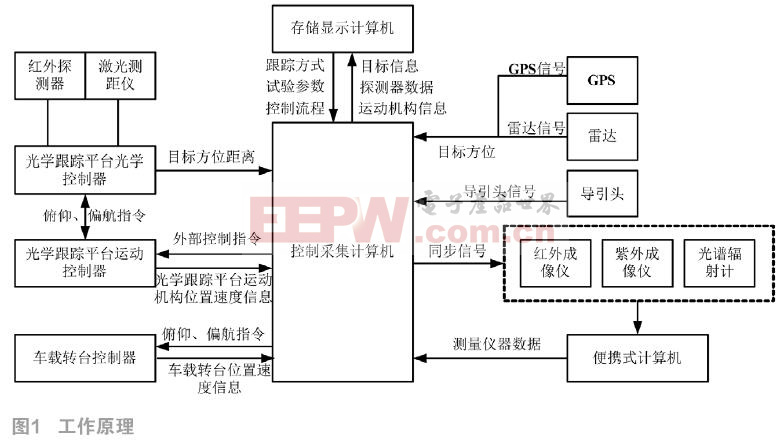
为满足武器系统外场试验对目标、背景及干扰的数据采集及其它制导系统的性能验证,本文设计了一种随动式车载光电搜跟系统。利用光学跟踪平台实现对动态目标的搜索和跟踪,同时控制车载转台随动,车载转台可搭载导引头等其它光学探测设备,提高了系统的负载能力。针对系统延时带来的跟踪误差,采用卡尔曼滤波算法对目标位置进行预测。试验结果表明,加入预测算法后,跟踪平台运动更加平稳,跟踪精度得到提高。针对设备间由于坐标不一致及安装精度和零位偏差带来随动误差,通过位置补偿对随动控制指令进行修正,改善了随动观测精度。系统采用模块化设计
关键字:
光电跟踪 卡尔曼滤波 预测 实时系统 201704
摘要:稳定平台隔离载体运动的特性使其在军事及民用领域中得到了广泛的应用。然而由于负载特性与工况的不同以及系统技术实现复杂等原因使得稳定平台的通用性不高。本文基于某武器系统的需要,对机电式双轴实时稳定平
关键字:
TMS320F2812 实时自动调平 卡尔曼滤波 PID算法
针对智能汽车竞赛中的电磁组参赛要求,提出了两轮自平衡智能车系统的设计方案。主控芯片采用飞思卡尔公司的MC9S12XS128,选用加速度传感器检测车模的倾角,陀螺仪检测车模的角加速度;通过控制两个电机的加减速实现车模的自平衡控制。阐述了卡尔曼滤波法在陀螺仪和加速度传感器信号融合方面的应用,提出了针对闭环速度控制的PI算法。实验表明:该处理方法实现简单,能够准确、快速地实现车模的自平衡控制。
关键字:
自平衡 智能车 卡尔曼滤波
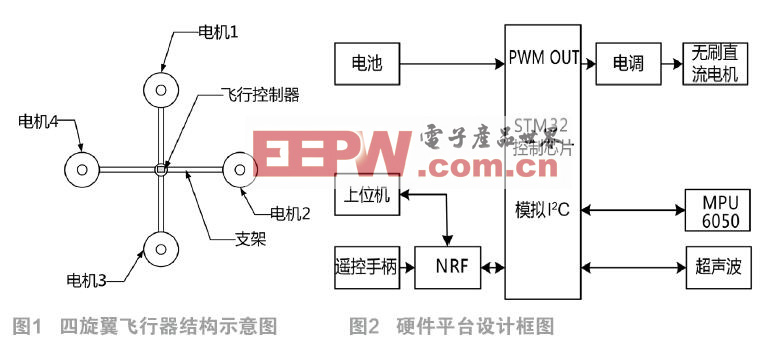
本文基于四旋翼飞行器的工作原理和性能特点,给出了飞行器控制系统设计方案,进行了姿态和高度数据采集的软件设计,并基于卡尔曼滤波算法完成了传感器数据融合,设计了PID控制器并完成了软件实现。实验结果表明,该控制系统能够稳定可靠运行,具有较强的鲁棒性。
关键字:
四旋翼飞行器 卡尔曼滤波 PID 鲁棒性 201610
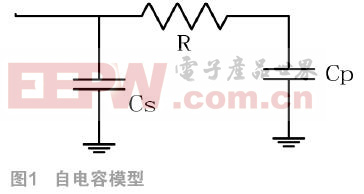
电容触摸屏在数据采集过程中不可避免地会产生系统噪声,为了提高触摸屏坐标定位的精确度,在对原始数据进行定位分析前,首先采用卡尔曼滤波方法对数据进行处理,再将数据在MATLAB中用定位算法计算出触摸屏的坐标值,并绘制坐标点图。结果表明,卡尔曼滤波确实能够有效去除噪声,从而提高触摸屏坐标定位的准确性,具有很高的实用性。
关键字:
电容触摸屏 卡尔曼滤波 坐标定位 201610
着重分析了两轮自平衡小车的设计原理与控制算法,采用卡尔曼滤波算法融合陀螺仪与加速度计信号,得到系统姿态倾角与角速度最优估计值,通过双闭环数字PID 算法实现系统的自平衡控制。设计了以MPU-6050传感器为姿态感知的两轮自平衡小车系统,选用8位单片机HT66FU50A为控制核心处理器,完成对传感器信号的采集处理、车身控制以及人机交互的设计,实现小车自主控制平衡状态、运行速度以及转向角度大小等功能。
关键字:
两轮自平衡 姿态检测 卡尔曼滤波 数据融合 PID 控制器 201603
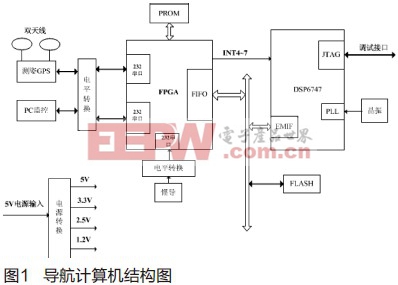
本系统作为浅组合导航系统的一种,利用了双天线定向GPS与光纤陀螺的组合,以基于DSP+FPGA多处理器结构作为导航计算机平台,在原有的位置与速度基础上加入了姿态作为第三个量测量,应用卡尔曼滤波算法将GPS姿态信息作为对惯性导航系统数据的初始值和修正。设计的系统通过跑车实验验证后表明达到了设计要求,具有实时性好,运算精度高等优点。
关键字:
GPS SINS 导航系统 FPGA 卡尔曼滤波 201401
提出一种以MSP430单片机为控制核心,GPS和GsM为控制对象的物流跟踪系统设计新方法;介绍该系统的整体结构和软硬件设计;同时还详细介绍了卡尔曼滤波算法,以及强跟踪卡尔曼滤波算法在物流跟踪系统中的应用。通过软件仿真和试验测量,验证了该系统跟踪结果的可靠性。该系统体积小、功耗低、定位精度高、实时跟踪性好、接口友好,适合贵重物品等在长距离运输跟踪中的应用。
关键字:
精度 滤波 算法 定位 系统 物流 跟踪 提高 单片机 GPS 卡尔曼滤波
在TWS雷达系统中,对跟踪目标的数据进行处理常常要进行卡尔曼滤波。卡尔曼滤波是一种最优估计的递推滤波...
关键字:
DSP 数据处理 卡尔曼滤波
卡尔曼滤波介绍
斯坦利.施密特(Stanley Schmidt)首次实现了卡尔曼滤波器.卡尔曼在NASA埃姆斯研究中心访问时,发现他的方法对于解决阿波罗计划的轨道预测很有用,后来阿波罗飞船的导航电脑使用了这种滤波器. 关于这种滤波器的论文由Swerling (1958), Kalman (1960)与 Kalman and Bucy (1961)发表.
目前,卡尔曼滤波已经有很多不同的实现.卡尔曼最初提出 [
查看详细 ]
关于我们 -
广告服务 -
企业会员服务 -
网站地图 -
联系我们 -
征稿 -
友情链接 -
手机EEPW
Copyright ©2000-2015 ELECTRONIC ENGINEERING & PRODUCT WORLD. All rights reserved.
《电子产品世界》杂志社 版权所有 北京东晓国际技术信息咨询有限公司
京ICP备12027778号-2 北京市公安局备案:1101082052 京公网安备11010802012473